





















Wszystkie produkty
-
Wielofunkcyjny przenośny noktowizor na podczerwień
-
Robot do usuwania materiałów wybuchowych
-
Miniaturowy robot rozpoznawczy
-
Monokularne cyfrowe widzenie nocne
-
Urządzenie cyfrowego widzenia nocnego
-
Przeciw snajperom
-
Przenośny radar
-
Lampa patrolowa rejestrująca
-
Sprzęt taktyczny do operacji specjalnych
-
Luneta celownicza
-
Dalmierz laserowy
-
Model wojskowy
-
wyposażenie taktyczne
-
Wzmocnione przynęty
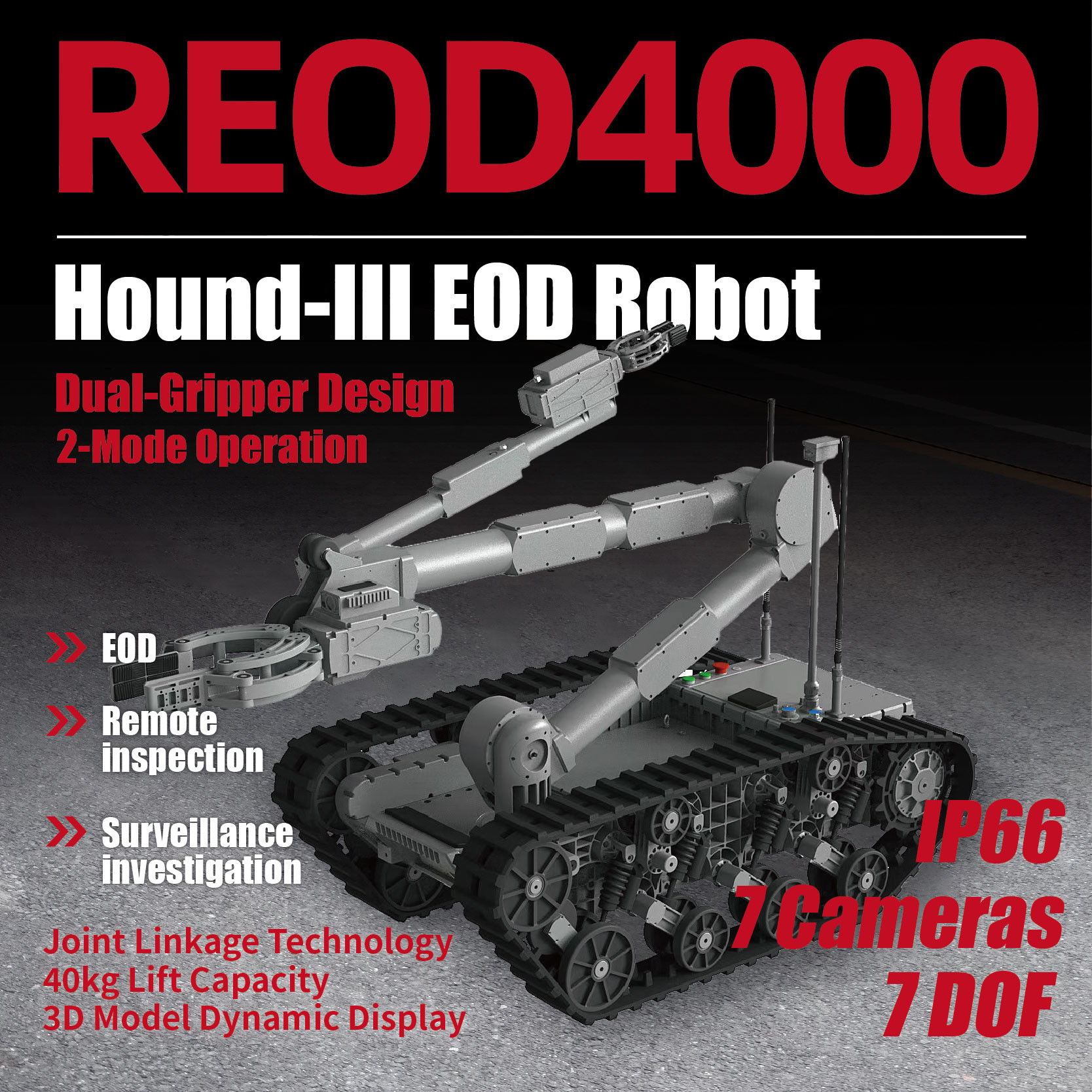
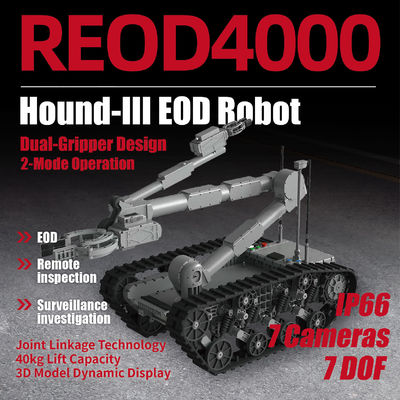
Potężny robot Hound-III EOD bezpiecznie zbliża się i usuwa zagrożenia wybuchowe









| Miejsce pochodzenia | Chiny |
|---|---|
| Nazwa handlowa | Particle |
| Numer modelu | REOD4000 |
| Minimalne zamówienie | 1 |
| Cena | $356,653 |
| Zasady płatności | T/T |

Skontaktuj się ze mną o darmowe próbki i kupony.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Jeśli masz jakiekolwiek obawy, oferujemy 24-godzinną pomoc online.
xSzczegóły Produktu
| Rozmiar robota | 1600×850×1300 mm (całkowicie złożone) | Waga robota | ≤350kg (zawiera baterie) |
|---|---|---|---|
| Maksymalna prędkość | ≥5 m/s | Zwycięstwo przeszkody | ≥400mm |
| Szerokość rowu | ≥800 mm | Zdolność pokonywania wzniesień | ≥45° |
| Maksymalna zdolność pokonywania zboczy | 35° | Głębokość wadowania | ≥500 mm |
| Czas pracy baterii (normalna temperatura) | ≥10 godz. | Maksymalna odległość chwytania | 2,6m |
| Maksymalna waga chwytaka | ≥200kg | Maksymalna średnica uchwytu | ≥355 mm |
| Maksymalna głębokość chwytania | 2,2m | Ruchome stawy | 7 |
| Rozmiar sterownika | ≤400×300×100mm | Waga kontrolera | ≤3kg (bez plecaka) |
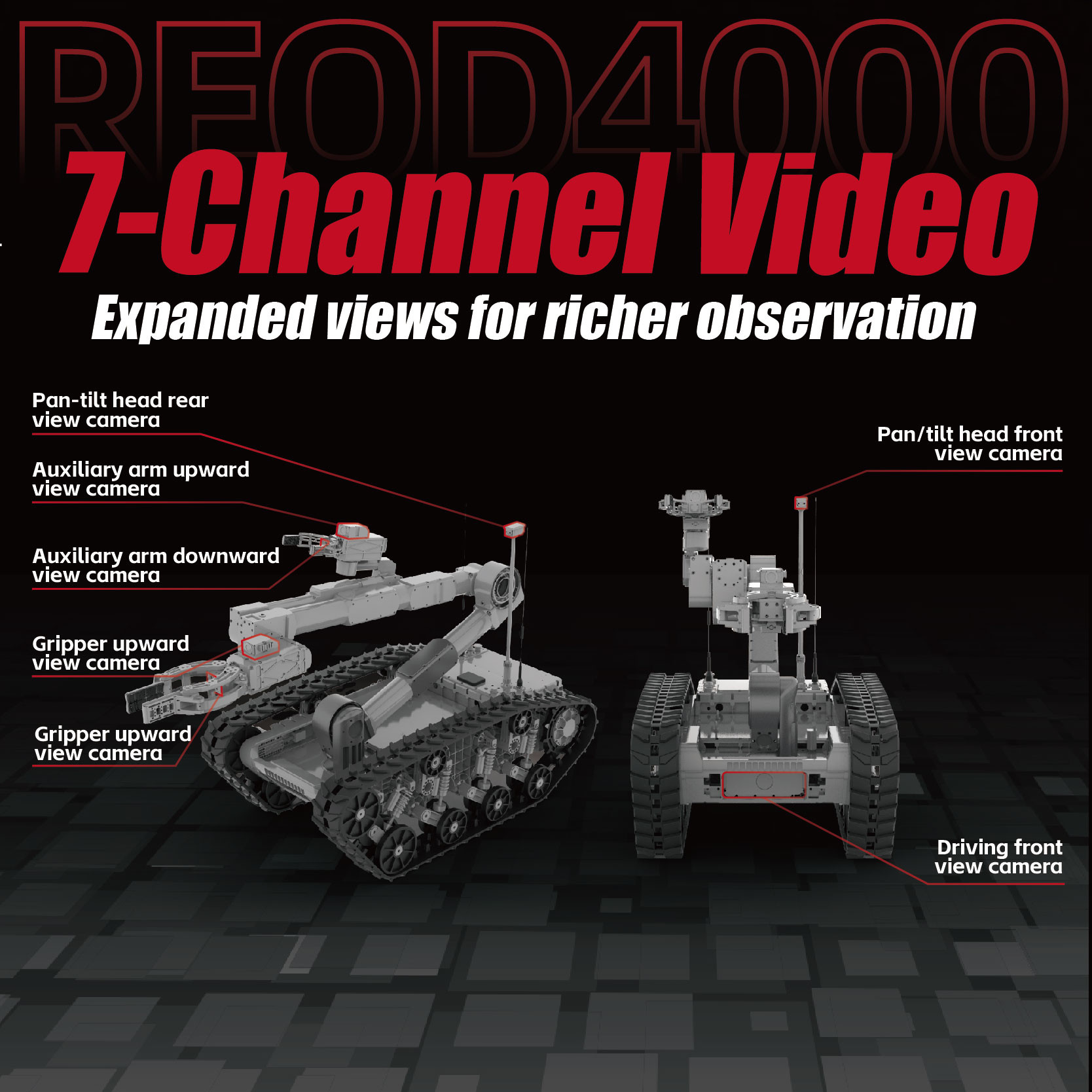
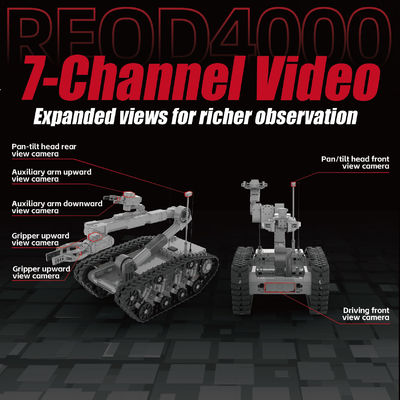
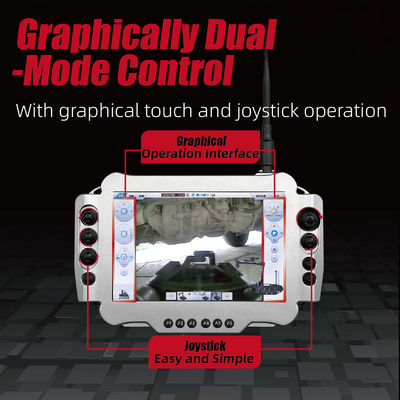
| Ekran wyświetlacza kontrolera | ≥12-calowy wyświetlacz LCD | Wyświetlacz wideo kontrolera | ≥7-kanałowy |
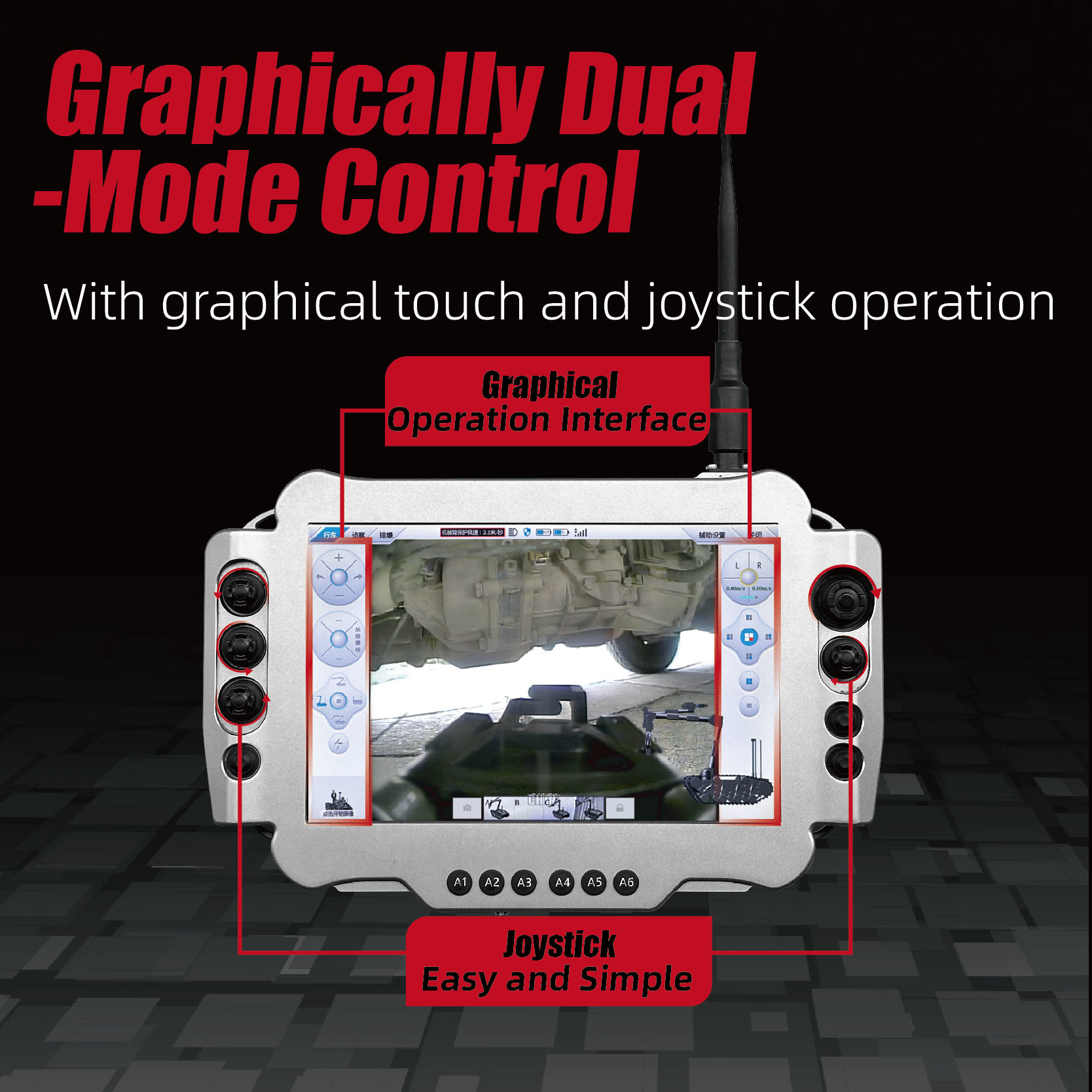
| Metoda operacji | Podwójne działanie przycisku i ekranu dotykowego | Metoda kontroli | Sterowanie kablowe ≥200 m (kabel standardowy), Sterowanie bezprzewodowe ≥1000 m (na zewnątrz) |
| Stopień IP platformy robota | IP66 | Stopień IP ramienia | IP66 |
| Temperatura pracy | -40 ℃ ~ + 50 ℃ | Temperatura przechowywania | -45 ℃ ~ 60 ℃ |
| Podkreślić | IP66 Robot do usuwania materiałów wybuchowych,2.6m Robot do usuwania materiałów wybuchowych,Robot EOD Hound-III |
||
opis produktu
Silny robot EOD Hound-III bezpiecznie zbliża się i usuwa zagrożenia wybuchowe
Opis i cechy
JP REOD4000 EOD Robot to zaawansowane średniej wielkości rozwiązanie do usuwania materiałów wybuchowych w środowiskach wysokiego ryzyka.umożliwia operatorom precyzyjne zarządzanie przedmiotami niebezpiecznymiSystem zawieszenia "Christie" zapewnia bezproblemową manewrowość na nierównych i złożonych terenach,co sprawia, że REOD4000 nadaje się do użytku w terenach terenowych i wymagających środowiskachMając maksymalną masę 200 kg, znacznie przewyższa swoje odpowiedniki, oferując niezawodne wsparcie dla usuwania materiałów wybuchowych, bezpieczeństwa publicznego i scenariuszy reagowania w nagłych wypadkach.
REOD4000 ma wymiary 1600 mm × 850 mm × 1300 mm (w pełni ustawione) i masę ≤ 350 kg, co zapewnia zarówno możliwości, jak i mobilność.odległość od przeszkody ≥ 400 mm, oraz z możliwością podniesienia się do poziomu ≥ 45°, zapewniając lepszą zwrotność i adaptację w różnych terenach.zbadać potencjalne zagrożenia, i wykonywać zadania związane z usuwaniem w sposób skuteczny, minimalizując ryzyko dla personelu.
![]()
Wysokiej wytrzymałości mechaniczne ramię
Dzięki "Wysokowytrzymałemu mechanicznemu układowi ramienia" robot jest wyposażony w potężną wydajność chwytania, umożliwiającą mu skuteczne chwytanie i łatwe obsługiwanie obiektów,znacząca poprawa efektywności i skuteczności operacyjnej w trudnych warunkach.
![]()
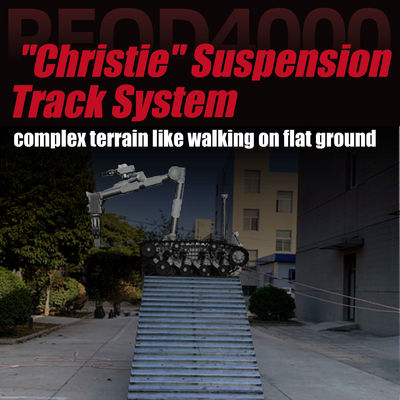
"Christie" System zawieszenia torów ️ Bezproblemowa nawigacja na złożonym terenie
Dzięki systemowi "Christie", który zapewnia płynne i stabilne poruszanie się, robot może przejeżdżać po złożonym terenie tak samo łatwo jak chodzenie po płaskim terenie.znacznie zwiększa mobilność i wydajność w trudnych i nierównych warunkach.
![]()
Graficzna obsługa w dwóch trybach wygodne i niezawodne doświadczenie operacyjne
Dzięki systemowi "Graficzna operacja w dwóch trybach" użytkownicy mogą bezproblemowo przełączać się między trybami, zapewniając wygodne i niezawodne obsługiwanie.nawet w wymagających scenariuszach.
![]()
Odległy wyświetlacz 3D w czasie rzeczywistym Precyzja w zasięgu ręki
"Dostępny wyświetlacz 3D w czasie rzeczywistym" pozwala kontrolować i monitorować zadania z niezrównaną precyzją, niezależnie od odległości.
![]()
Inteligentna konstrukcja sterowania "przed ustawieniem"
"Inteligentna konstrukcja sterowania ustawieniem wstępnym" umożliwia personalizowane ustawienia postawy roboczej,umożliwienie operatorom ustawiania preferowanych pozycji i usprawniania wykonywania zadań w celu zwiększenia wydajności i komfortu.
![]()
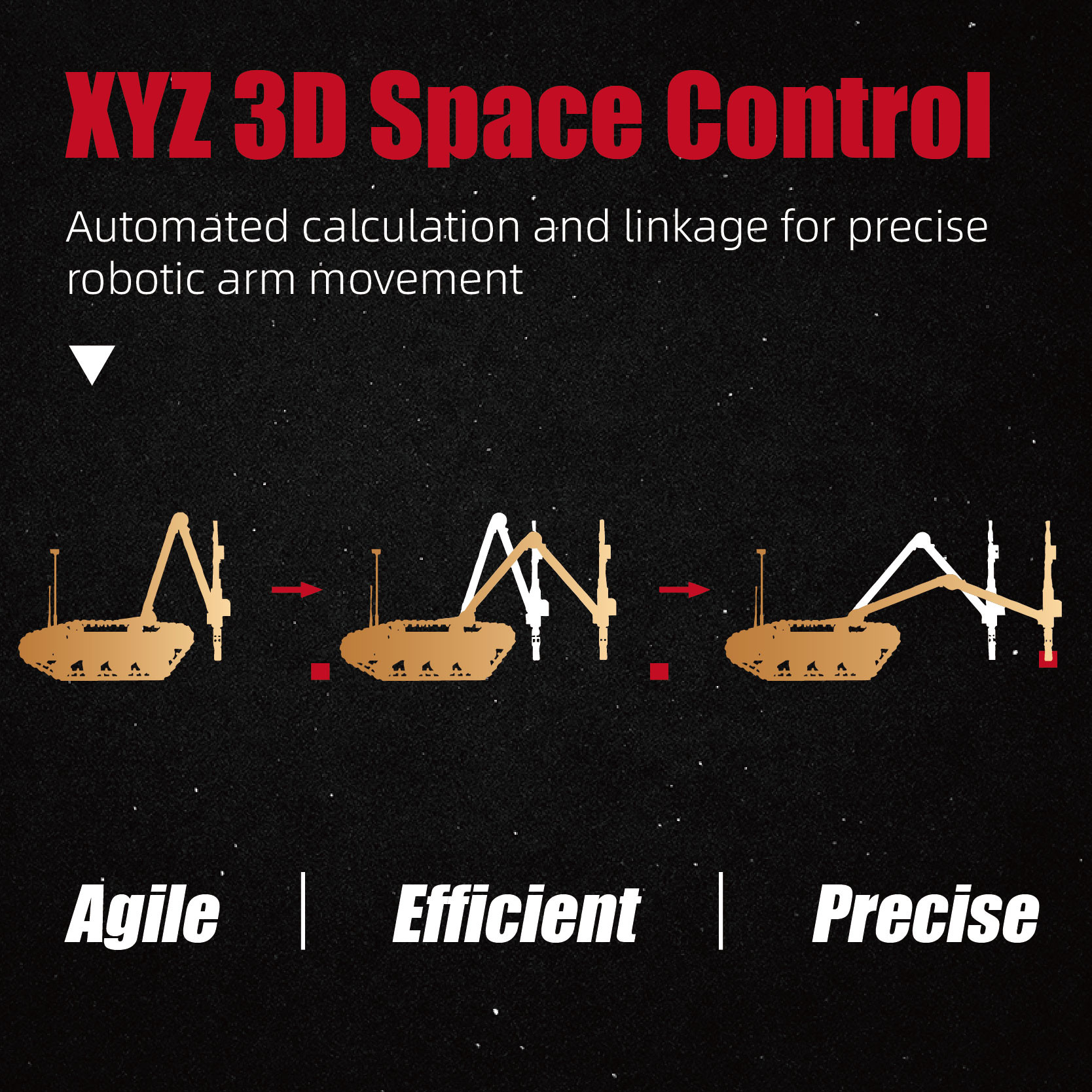
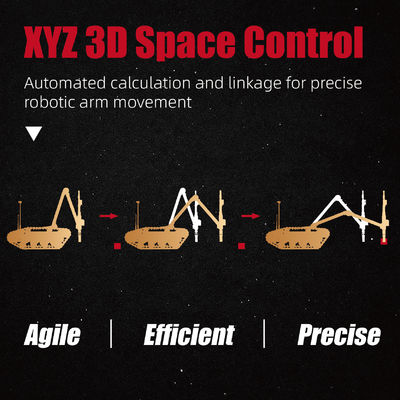
X-Y-Z 3D Robotic Arm Linkage Precyzyjne sterowanie z automatycznym obliczeniem
Projekt "X-Y-Z Three-Dimensional Space Robotic Arm Linkage", oparty na automatycznych obliczeniach, zapewnia precyzyjne sterowanie, pomagając użytkownikom bez wysiłku zarządzać złożonymi ruchami z większą dokładnością.
![]()
Wnioski
Galeria zdjęć
|
|
Parametry techniczne
| Platforma robota | |
|
Wielkość |
1600×850×1300 mm ((W pełni schowane) |
|
Waga |
≤ 350 kg ((Obejmuje baterie) |
|
Maksymalna prędkość |
≥ 5 m/s |
|
Zwyciężenie przeszkody |
≥ 400 mm |
|
Szerokość rowu |
≥ 800 mm |
|
Zmiana klasyfikacji |
≥ 45o |
|
Maksymalna pojemność przepustowa na zboczu |
35° |
|
Głębokość wadowania |
≥ 500 mm |
|
Długość działania baterii ((Normalna temperatura) |
≥10h |
| Wykonanie robotów chwytających za ramię | |
|
Maksymalna odległość chwytania |
20,6 m |
|
Maksymalna waga chwytania |
≥ 200 kg |
|
Maksymalna średnica chwytania |
≥ 355 mm |
|
Maksymalna głębokość chwytania |
2.2m |
|
Złącza ruchome |
7 |
| Przenośny sterownik | |
|
Wielkość |
≤ 400×300×100 mm (z wyłączeniem anteny) |
|
Waga |
≤3kg ((bez plecaków) |
|
Wyświetlanie ekranu |
LCD o średnicy ≥ 12' |
|
Wyświetlacz |
≥ 7-kanałowe |
|
Metoda działania |
Dwuwarzędowe działanie guzików i ekranu dotykowego |
|
Metoda kontroli |
Kontrola kablowa ≥200m ((Standardowy kabel),kontrola bezprzewodowa ≥1000m ((Wydrzewny) |
| Poziom ochrony i zdolność adaptacji do środowiska | |
|
Platforma robota |
IP66 |
|
Ramię |
IP66 |
|
Temperatura pracy |
-40°C+50°C |
Pani Amy.
E-mail:/amy-huang@mysmech.com
Polecane produkty