





















Wszystkie produkty
-
Wielofunkcyjny przenośny noktowizor na podczerwień
-
Robot do usuwania materiałów wybuchowych
-
Miniaturowy robot rozpoznawczy
-
Monokularne cyfrowe widzenie nocne
-
Urządzenie cyfrowego widzenia nocnego
-
Przeciw snajperom
-
Przenośny radar
-
Lampa patrolowa rejestrująca
-
Sprzęt taktyczny do operacji specjalnych
-
Luneta celownicza
-
Dalmierz laserowy
-
Model wojskowy
-
wyposażenie taktyczne
-
Wzmocnione przynęty
Projekt ramienia robotycznego Robot zdalnego sterowania Hound-II EOD


| Miejsce pochodzenia | Chiny |
|---|---|
| Nazwa handlowa | Particle |
| Numer modelu | REOD500 |
| Minimalne zamówienie | 1 |
| Cena | $205,761 |
| Szczegóły pakowania | Wchodź po schodach |
| Zasady płatności | T/T |

Skontaktuj się ze mną o darmowe próbki i kupony.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Jeśli masz jakiekolwiek obawy, oferujemy 24-godzinną pomoc online.
xSzczegóły Produktu
| Ramię manipulatora | - Tak, proszę. | Temperatura pracy | -40 ℃ ~ + 50 ℃ |
|---|---|---|---|
| Zdalne sterowanie | - Tak, proszę. | Wchodź po schodach | ≥45° |
| Głębokość wadowania | ≥200mm | Żywotność baterii (normalna temperatura) | ≥3 godz |
| Rozmiar robota | ≤950×650×650mm (całkowicie złożone) | Waga robota | ≤50kg (zawiera dwa zestawy baterii) |
| Maksymalna prędkość | ≥2m/s (5 biegów, płynna regulacja) | Zwycięstwo przeszkody | ≥400mm |
| Szerokość rowu | ≥400mm | Zdolność pokonywania wzniesień | ≥45° |
| Czas pracy baterii (normalna temperatura) | ≥3 godz | Długość ramienia | 2000 mm |
| Maksymalna waga wyrwania | ≥40kg | Pazury | 2 |
| Ruchome stawy | 8 | Rozmiar sterownika | ≤270mm×170mm×100mm |
| Waga kontrolera | ≤1,2 kg (bez plecaka) | Ekran wyświetlacza kontrolera | 7-calowy wyświetlacz LCD |
| Wyświetlacz wideo | 7-kanałowy, z których jeden ma funkcję automatycznego ustawiania ostrości i zoomu | Metoda operacji | Podwójne działanie przycisku i ekranu dotykowego |
| Metoda kontroli | Sterowanie kablowe ≥100m (standardowy kabel), sterowanie bezprzewodowe ≥1000m (na zewnątrz) | Stopień IP platformy robota | IP66 |
| Stopień IP ramienia | IP66 | Temperatura przechowywania | -45 ℃ ~ 60 ℃ |
| Podkreślić | Robot EOD Hound-II,IP66 Robot EOD,2000 mm eod robotowy |
||
opis produktu
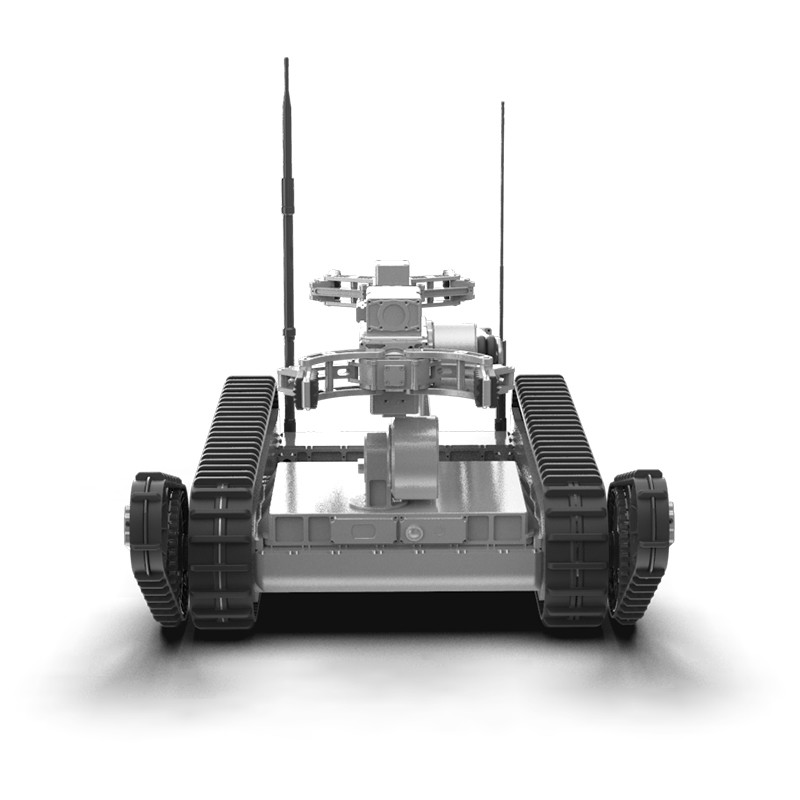
Projekt ramienia robotycznego Robot zdalnego sterowania Hound-II
|
Wnioski JP REOD500 dziedziczy awangardową koncepcję projektową robotów serii Hound.połączenie głównego pełzacza i przesuwanego ramienia przeszkody znacząco zwiększa zdolność robotów do przekraczania przeszkódTa zaawansowana konstrukcja zapewnia, że JP REOD500 może łatwo poruszać się po trudnych terenach, co czyni go idealnym wyborem do operacji EOD w różnych środowiskach.
Funkcjonalność Kontrola zdalna w celu zbliżenia się do niebezpiecznej sceny,badania potencjalnych źródeł niebezpieczeństwa,podjęcie środków usuwania lub przenoszenie zagrożeń zgodnie z celami misji,Ochrona pracowników linii frontu i społeczeństwa przed obrażeniami ciała.
Cechy 1Zwiększona konstrukcja ramienia mechanicznego, znacznie poprawiona wydajność chwytania; ★2. patent "dwa pazury", można jednocześnie rozwiązywać wiele zadań; 3. Graficzne działanie w dwóch trybach, wygodne i niezawodne działanie; ★4. zdalny wyświetlacz 3D w czasie rzeczywistym, precyzyjna obsługa przed oczami; ★5. Inteligentna konstrukcja sterowania "przed ustawieniem", personalizowane ustawianie postawy roboczej; ★6. trójwymiarowy układ łączenia ramienia robota kosmicznego "X-Y-Z" oparty na automatycznych obliczeniach pomaga precyzyjnie sterować; 7. 7-kanałowe obrazy wideo, bogatsze perspektywy obserwacyjne; 8. konstrukcja ramienia robotycznego o 8 stopniach swobody, bardziej elastyczne sterowanie; 9. Różnorodne narzędzia rozszerzające mogą być szybko wymieniane, aby spokojnie radzić sobie z różnymi warunkami pracy;
Parametry techniczne
REOD500 Szczegóły
|
Polecane produkty