





















Wszystkie produkty
-
Wielofunkcyjny przenośny noktowizor na podczerwień
-
Robot do usuwania materiałów wybuchowych
-
Miniaturowy robot rozpoznawczy
-
Monokularne cyfrowe widzenie nocne
-
Urządzenie cyfrowego widzenia nocnego
-
Przeciw snajperom
-
Przenośny radar
-
Lampa patrolowa rejestrująca
-
Sprzęt taktyczny do operacji specjalnych
-
Luneta celownicza
-
Dalmierz laserowy
-
Model wojskowy
-
wyposażenie taktyczne
-
Wzmocnione przynęty
X-Y-Z Trójwymiarowy Kosmiczny Robot Ręka Robotyczny Robot Rozbrojeniowy Roboty Rozstrzygające





| Miejsce pochodzenia | Chiny |
|---|---|
| Nazwa handlowa | Particle |
| Numer modelu | REOD500 |
| Minimalne zamówienie | 1 |
| Cena | $205,761 |
| Zasady płatności | T/T |

Skontaktuj się ze mną o darmowe próbki i kupony.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Jeśli masz jakiekolwiek obawy, oferujemy 24-godzinną pomoc online.
xSzczegóły Produktu
| Ramię manipulatora | - Tak, proszę. | X-Y-Z trójwymiarowy projekt połączenia ramienia robota w przestrzeni kosmicznej | pomaga dokładnie kontrolować |
|---|---|---|---|
| Projekt ramienia robota o 8 stopniach swobody | bardziej elastyczna kontrola | Temperatura pracy | -40 ℃ ~ + 50 ℃ |
| Wchodź po schodach | ≥45° | Inteligentny, wstępnie ustawiony projekt sterowania | spersonalizowane ustawienie pozycji roboczej |
| Rozmiar robota | ≤950×650×650mm (całkowicie złożone) | Waga robota | ≤50kg (zawiera dwa zestawy baterii) |
| Maksymalna prędkość | ≥2m/s (5 biegów, płynna regulacja) | Zwycięstwo przeszkody | ≥400mm |
| Szerokość rowu | ≥400mm | Zdolność pokonywania wzniesień | ≥45° |
| Głębokość wadowania | ≥200mm | Czas pracy baterii (normalna temperatura) | ≥3 godz |
| Długość ramienia | 2000 mm | Maksymalna waga wyrwania | ≥40kg |
| Pazury | 2 | Ruchome stawy | 8 |
| Rozmiar sterownika | ≤270mm×170mm×100mm | Waga kontrolera | ≤1,2 kg (bez plecaka) |
| Ekran wyświetlacza kontrolera | 7-calowy wyświetlacz LCD | Wyświetlacz wideo | 7-kanałowy, z których jeden ma funkcję automatycznego ustawiania ostrości i zoomu |
| Metoda operacji | Podwójne działanie przycisku i ekranu dotykowego | Metoda kontroli | Sterowanie kablowe ≥100m (standardowy kabel), sterowanie bezprzewodowe ≥1000m (na zewnątrz) |
| Stopień IP platformy robota | IP66 | Stopień IP ramienia | IP66 |
| Temperatura przechowywania | -45 ℃ ~ 60 ℃ | ||
| Podkreślić | Trójwymiarowy robot do usuwania materiałów wybuchowych,7 kanałowy robot do usuwania materiałów wybuchowych,IP66 robot do usuwania odpadów |
||
opis produktu
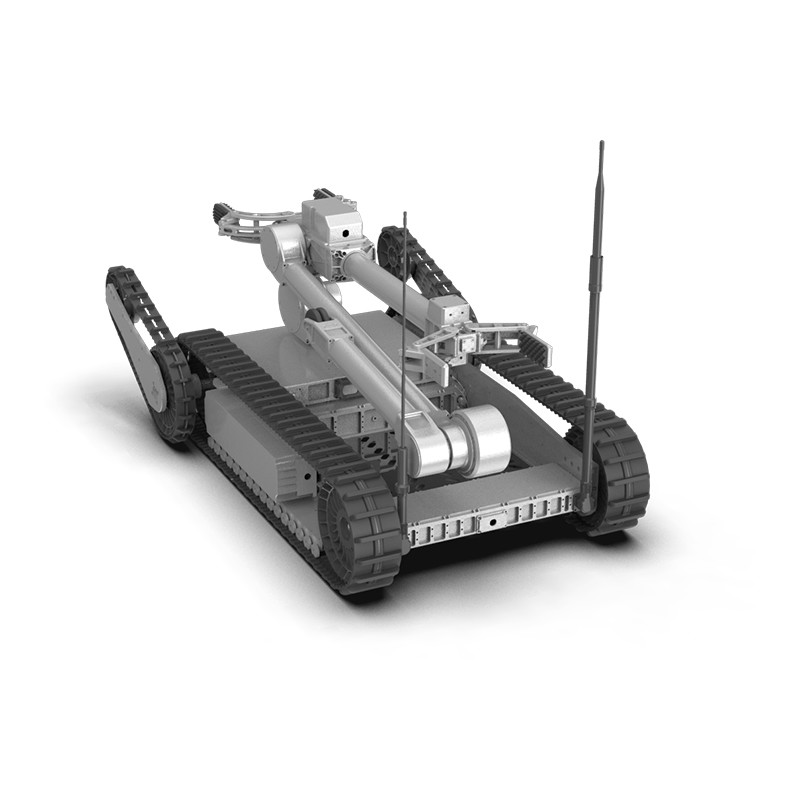
X-Y-Z Trójwymiarowy Kosmiczny Robot Ręka Wybuchowa Robot Rozrzucający Zbroje
|
Wnioski JP REOD500, czerpiąc z innowacyjnych zasad projektowania serii Hound, posiada system pełzającego z ramieniem huśtawkowym, który integruje zarówno główny pełzający, jak i pełzający z ramieniem huśtawkowym.To wyjątkowe połączenie znacznie poprawia zdolność robota do pokonywania przeszkód, zapewniając mu niezrównaną mobilność i stabilność w trudnych i niebezpiecznych warunkach, zwiększając w ten sposób bezpieczeństwo i skuteczność misji EOD.
Funkcjonalność Kontrola zdalna w celu zbliżenia się do niebezpiecznego miejsca,Badania potencjalnych źródeł niebezpieczeństwa,Przyjmowanie środków usuwania lub przenoszenie zagrożeń zgodnie z celami misji,Ochrona pracowników linii frontu i społeczeństwa przed obrażeniami ciała.
Cechy 1Zwiększona konstrukcja ramienia mechanicznego, znacznie poprawiona wydajność chwytania; ★2. patent "dwa pazury", można jednocześnie rozwiązywać wiele zadań; 3. Graficzne działanie w dwóch trybach, wygodne i niezawodne działanie; ★4. zdalny wyświetlacz 3D w czasie rzeczywistym, precyzyjna obsługa przed oczami; ★5. Inteligentna konstrukcja sterowania "przed ustawieniem", personalizowane ustawianie postawy roboczej; ★6. trójwymiarowy układ łączenia ramienia robota kosmicznego "X-Y-Z" oparty na automatycznych obliczeniach pomaga precyzyjnie sterować; 7. 7-kanałowe obrazy wideo, bogatsze perspektywy obserwacyjne; 8. konstrukcja ramienia robotycznego o 8 stopniach swobody, bardziej elastyczne sterowanie; 9. Różnorodne narzędzia rozszerzające mogą być szybko wymieniane, aby spokojnie radzić sobie z różnymi warunkami pracy;
Parametry techniczne
REOD500 Szczegóły
|
Polecane produkty