





















Wszystkie produkty
-
Wielofunkcyjny przenośny noktowizor na podczerwień
-
Robot do usuwania materiałów wybuchowych
-
Miniaturowy robot rozpoznawczy
-
Monokularne cyfrowe widzenie nocne
-
Urządzenie cyfrowego widzenia nocnego
-
Przeciw snajperom
-
Przenośny radar
-
Lampa patrolowa rejestrująca
-
Sprzęt taktyczny do operacji specjalnych
-
Luneta celownicza
-
Dalmierz laserowy
-
Model wojskowy
-
wyposażenie taktyczne
-
Wzmocnione przynęty
X-Y-Z koordynujący ramię robotowe Robot EOD średniej wielkości









| Miejsce pochodzenia | Chiny |
|---|---|
| Nazwa handlowa | Particle |
| Numer modelu | REOD500 |
| Minimalne zamówienie | 1 |
| Cena | $205,761 |
| Zasady płatności | T/T |

Skontaktuj się ze mną o darmowe próbki i kupony.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Jeśli masz jakiekolwiek obawy, oferujemy 24-godzinną pomoc online.
xSzczegóły Produktu
| Maksymalna prędkość | ≥2m/s (5 biegów, płynna regulacja) | Cechy szczególne | Przeciwwybuchowy, wodoodporny, z możliwością zdalnego rozbrojenia |
|---|---|---|---|
| Nazwa produktu | Cele misji Robot Hound-III EOD do usuwania odpadów i przenoszenia zagrożeń | Cechy | 1. Konstrukcja mechanicznego ramienia o wysokiej wytrzymałości zapewnia wysoką wydajność wyrywania; |
| Waga robotowej platformy | ≤ 350 kg ((zawiera baterie); | Głębokość wadowania platformy robotowej | ≥ 500 mm; |
| Wnioski | Reagowanie na improwizowane urządzenia wybuchowe | Rozmiar platformy robota | 1600×850×1300 mm ((Całkowicie schowane); |
| Rozmiar robota | ≤950×650×650mm (całkowicie złożone) | Waga robota | ≤50kg (zawiera dwa zestawy baterii) |
| Zwycięstwo przeszkody | ≥400mm | Szerokość rowu | ≥400mm |
| Zdolność pokonywania wzniesień | ≥45° | Wchodź po schodach | ≥45° |
| Głębokość wadowania | ≥200mm | Czas pracy baterii (normalna temperatura) | ≥3 godz |
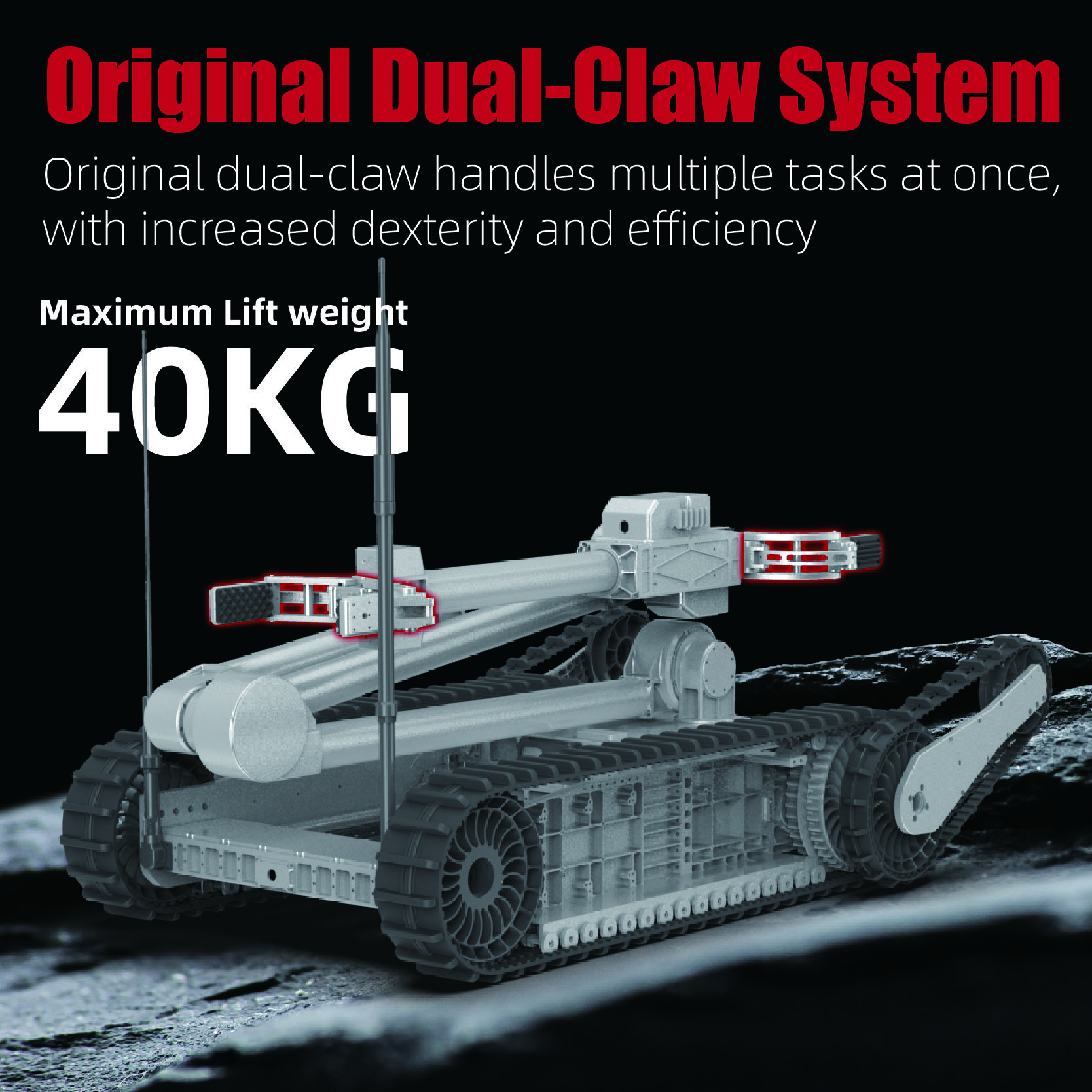
| Długość ramienia | 2000 mm | Maksymalna waga wyrwania | ≥40kg |
| Pazury | 2 | Ruchome stawy | 8 |
| Rozmiar sterownika | ≤270mm×170mm×100mm | Waga kontrolera | ≤1,2 kg (bez plecaka) |
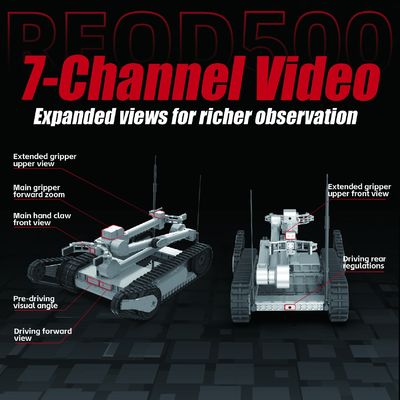
| Ekran wyświetlacza kontrolera | 7-calowy wyświetlacz LCD | Wyświetlacz wideo | 7-kanałowy, z których jeden ma funkcję automatycznego ustawiania ostrości i zoomu |
| Metoda operacji | Podwójne działanie przycisku i ekranu dotykowego | Metoda kontroli | Sterowanie kablowe ≥100m (standardowy kabel), sterowanie bezprzewodowe ≥1000m (na zewnątrz) |
| Stopień IP platformy robota | IP66 | Stopień IP ramienia | IP66 |
| Temperatura pracy | -40 ℃ ~ + 50 ℃ | Temperatura przechowywania | -45 ℃ ~ 60 ℃ |
| Podkreślić | Robot do likwidacji materiałów wybuchowych,Robot do usuwania średnich materiałów wybuchowych,IP66 eod robotów |
||
opis produktu
Zaawansowani X-Y-Z koordynujący ramię robotyczne średniej wielkości producenci robotów EOD
Opis i cechy
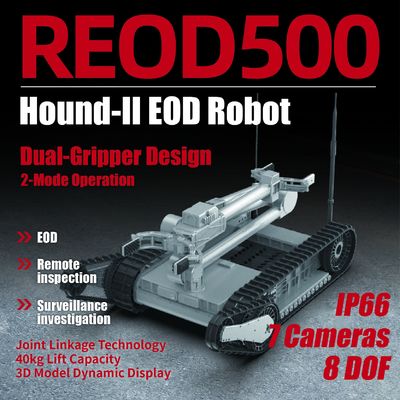
JP REOD500 EOD Robot jest zaawansowanym rozwiązaniem do usuwania materiałów wybuchowych (EOD) w środowiskach wysokiego ryzyka.Wyposażone w system pełzającego z ramieniem huśtawkowym łączący główny pełzający z mechanizmem przeszkód z ramieniem huśtawkowym, ta konstrukcja znacząco poprawia zdolności nawigacji przez przeszkody, zapewniając solidną i niezawodną wydajność w operacjach EOD.Robot jest wyposażony w ramię z wieloma stopniami swobody, które zapewnia potężne możliwości chwytania i obsługi. JP REOD500 ma wymiary ≤900 mm × 650 mm × 500 mm (w pełni schowany) i masę ≤42 kg. Ma maksymalną prędkość ≥2,0 m/s, odległość od przeszkody ≥320 mm,i zdolność do podnoszenia się na stopniach do 45°, zapewniając wyższą zdolność manewrowania w różnych terenach.
Wyposażony w Manipulator o 8 stopniach swobody, JP REOD500 oferuje precyzyjne sterowanie z maksymalną wysokością uchwytu ≥1800 mm (główny pazur) i najdalszą odległością chwytania ≥1400 mm (główny pazur).Robot obsługuje 7-kanałowy ekran wideo, umożliwiające bogatsze perspektywy obserwacyjne i posiada zdalne możliwości wyświetlania postawy 3D w czasie rzeczywistym.o wartości IP67 dla odporności na kurz i wodę, oraz metody sterowania, które obejmują sterowanie kablami do 120 m i sterowanie bezprzewodowe do 1200 m, JP REOD500 jest zbudowany z myślą o niezawodności i wszechstronności w trudnych warunkach.oferuje opcje dostosowywania OEM i ODM w celu zaspokojenia konkretnych potrzeb operacyjnych.
Zwiększona konstrukcja ramienia mechanicznego znacznie poprawiona wydajność uchwytu
JP REOD500 posiada ulepszoną konstrukcję ramienia mechanicznego, która znacznie poprawia jego zdolności chwytania.Ta zaawansowana konstrukcja pozwala robotowi z większą precyzją i wytrzymałością poruszać się różnymi niebezpiecznymi przedmiotami, zwiększając ogólną skuteczność operacji EOD.
Innowacyjny projekt patentowy typu "dwa pazury"
Patentowana konstrukcja "dwa pazury" pozwala na jednoczesne rozwiązywanie wielu zadań.takie jak chwytanie przedmiotów podczas otwierania drzwi lub wykonywania innych zadań pomocniczych, co czyni go wysoce skutecznym w misjach EOD.
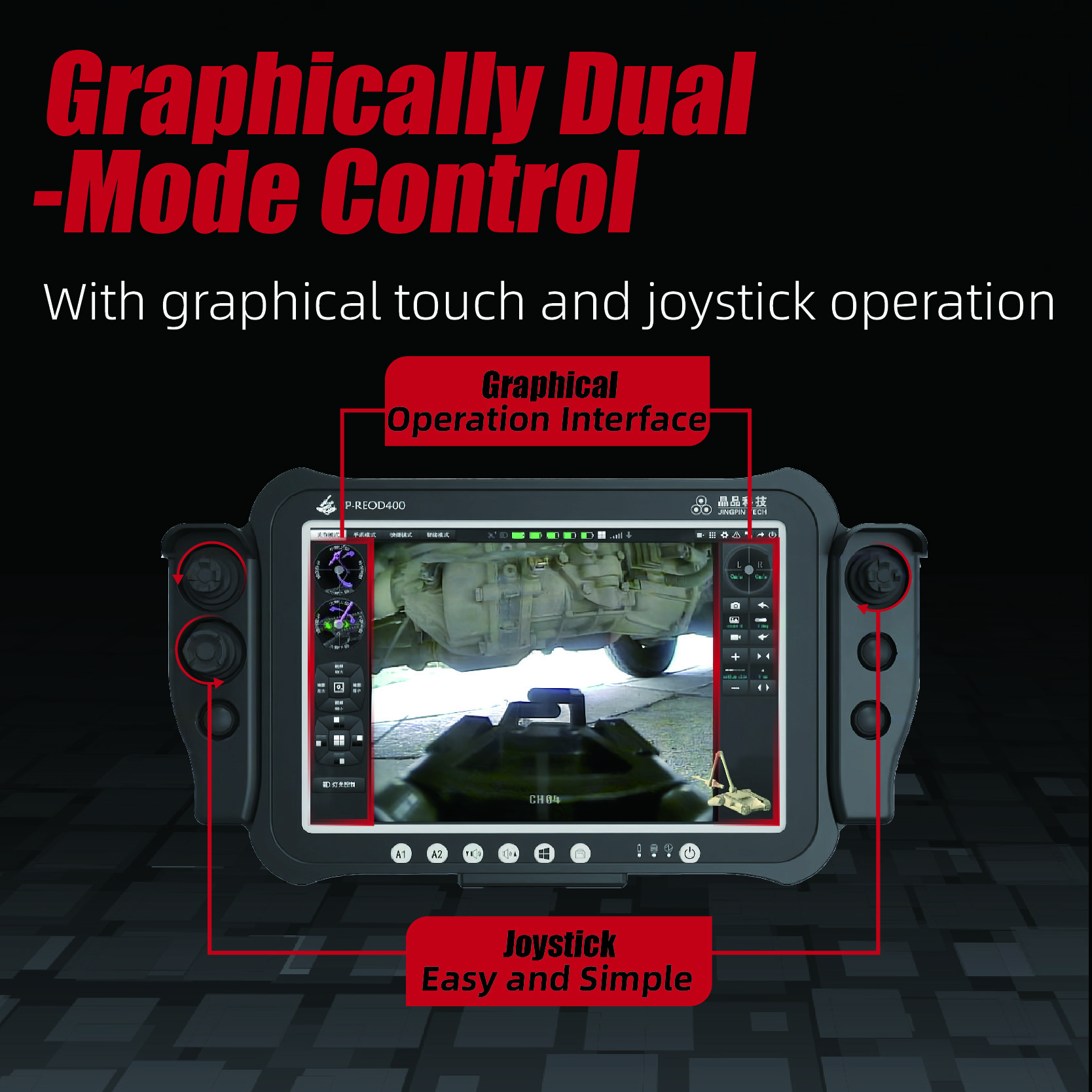
Graficzna obsługa w dwóch trybach wygodne i niezawodne doświadczenie operacyjne
Graficzne działanie w dwóch trybach zapewnia użytkownikom intuicyjny interfejs do sterowania robotem.zapewnienie łatwości użytkowania i niezawodności w środowiskach o wysokim obciążeniuTakie zaprojektowanie eliminuje potrzebę zapamiętywania przez użytkowników skomplikowanych funkcji przycisków, skracając czas szkolenia i zwiększając wydajność operacyjną.
Odległy wyświetlacz 3D w czasie rzeczywistym
JP REOD500 wykorzystuje zaawansowaną technologię wirtualnego wyświetlania 3D do informacji zwrotnej w czasie rzeczywistym o stanie robota.zapewnienie intuicyjnego i szczegółowego zrozumienia pozycji i środowiska robota, nawet gdy działa poza linią widzenia.
Inteligentny system sterowania ustawieniami wstępnymi
Inteligentna konstrukcja sterowania "przed ustawieniem" pozwala JP REOD500 automatycznie osiągnąć ustawione ustawienia jednym kliknięciem, w oparciu o potrzeby użytkownika.zmniejszenie ilości wymaganej ręcznej interwencji i zapewnienie szybkiego i niezawodnego wykonywania zadań.
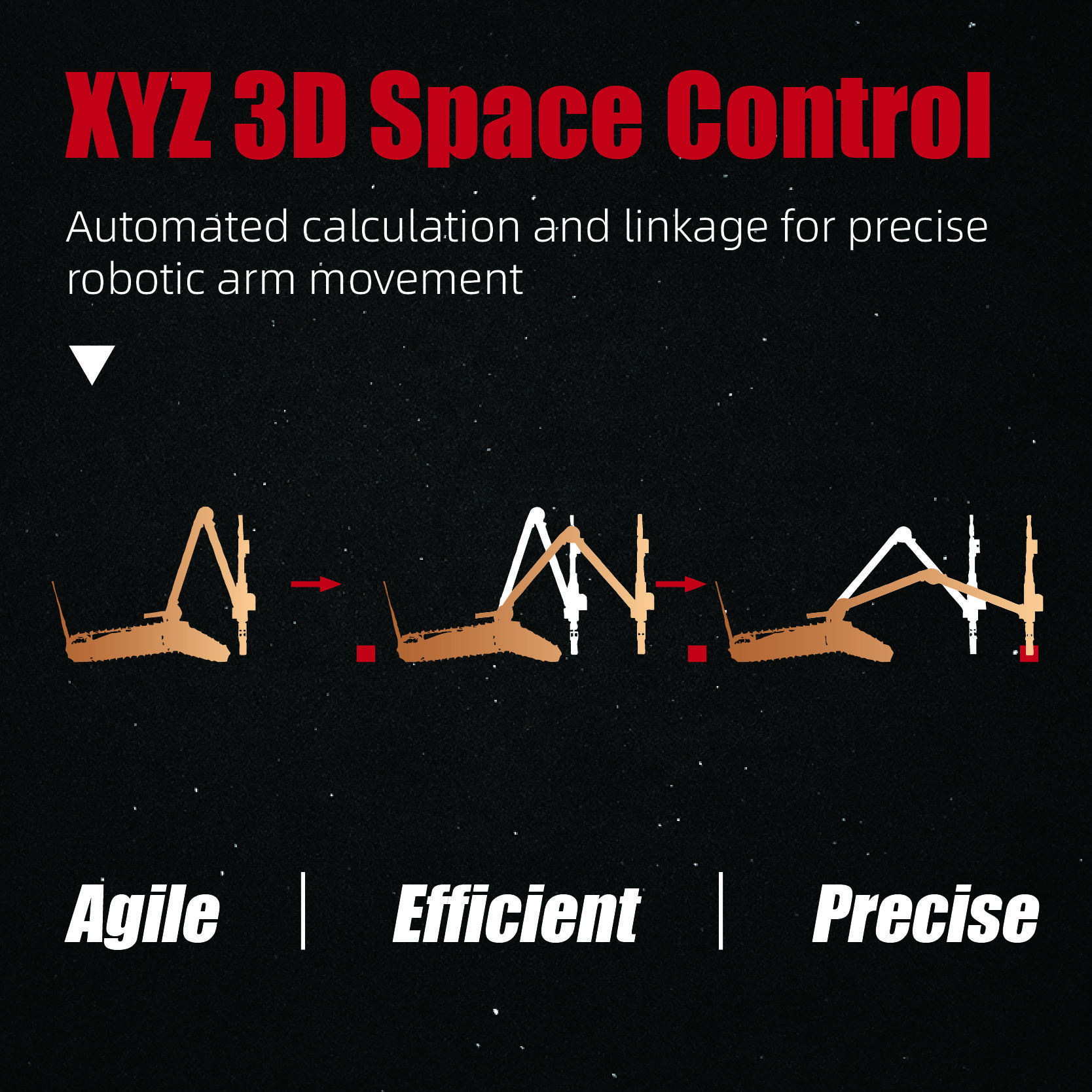
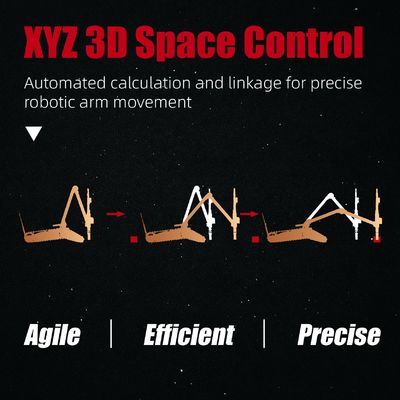
"X-Y-Z" Trójwymiarowy Kosmiczny Robot Arms Linkage Design
JP REOD500 wykorzystuje trójwymiarowy układ łączenia ramienia robotycznego "X-Y-Z" oparty na automatycznych obliczeniach, zapewniając precyzyjną kontrolę ruchów robota.Ten projekt zwiększa wydajność i dokładność zadań związanych z usuwaniem bomb, skracając średni czas pracy nawet o 80% w porównaniu z tradycyjnym sterowaniem pojedynczym stawem.
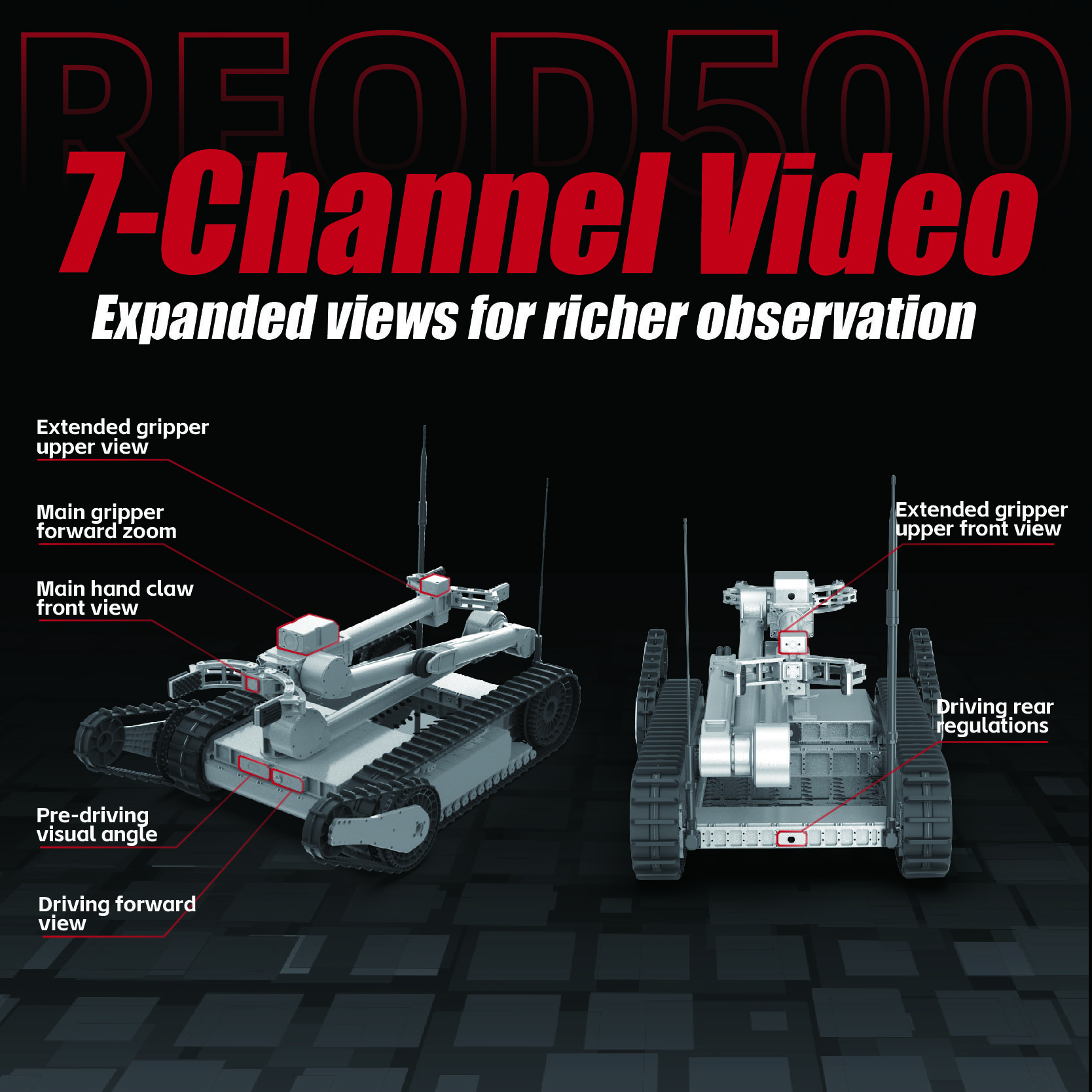
7-kanałowy system wideo bogatsze perspektywy obserwacyjne
Wyposażony w 7-kanałowy system wideo, JP REOD500 zapewnia wiele kątów obserwacji w celu zwiększenia świadomości sytuacji.tryb głównego uchwytu, oraz tryb uchwytu pomocniczego, dostosowujący się do warunków eksploatacyjnych w celu optymalnego widzenia.
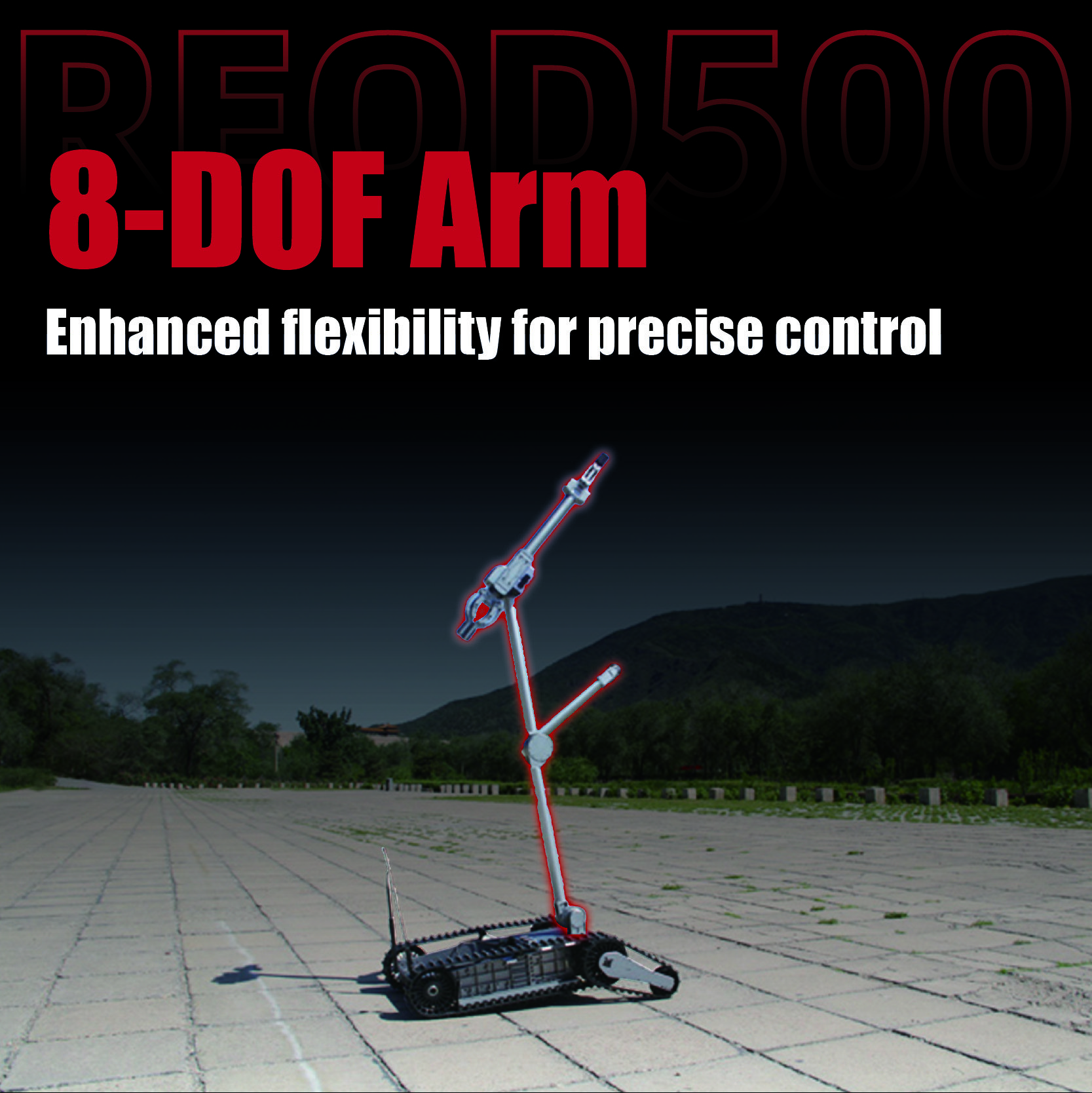
Projektowanie ramienia robotycznego o 8 stopniach swobody
Konstrukcja ramienia robotycznego o 8 stopniach swobody daje JP REOD500 silne możliwości przestrzenne, umożliwiając wykonywanie zadań w środowiskach wysokich, niskich, głębokich lub na stole.Ta elastyczność sprawia, że nadaje się do szerokiego zakresu operacji EOD wymagających precyzji i elastyczności.
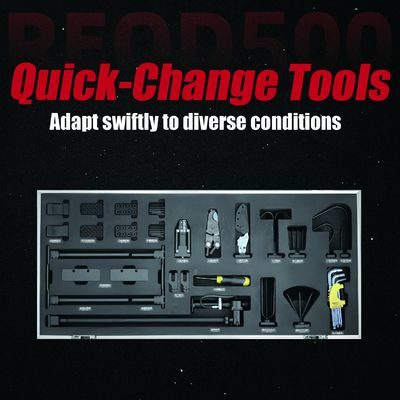
Wszechstronny system szybkiej wymiany narzędzi
JP REOD500 jest wyposażony w wszechstronny system narzędzi szybkiej zmiany, w tym wiele zestawów narzędzi chwytliwych, podstawowych zestawów narzędzi i rozszerzonych zestawów narzędzi.Narzędzia te można szybko wymienić na podstawie specyficznych wymagań operacyjnych, umożliwiając robotom bezproblemowe dostosowanie się do różnych warunków pracy i skuteczne radzenie sobie z różnymi rodzajami zagrożeń.
Wnioski
Galeria zdjęć
Parametry techniczne
| Platforma robota | |
|
Wielkość |
≤950×650×650mm ((W pełni ustawione) |
|
Waga |
≤ 50 kg ((zawiera dwa zestawy baterii) |
|
Maksymalna prędkość |
≥ 2m/s ((5 biegów, ciągła zmiana) |
|
Zwyciężenie przeszkody |
≥ 400 mm |
|
Szerokość rowu |
≥ 400 mm |
|
Zmiana klasyfikacji |
≥ 45° |
|
Wchodź po schodach |
≥ 45° |
|
Głębokość wadowania |
≥ 200 mm |
|
Długość działania baterii ((Normalna temperatura) |
≥ 3h |
|
Wykonanie robotów chwytających za ramię |
|
|
Długość ramienia |
2000 mm |
|
Maksymalna waga łupów |
≥ 40 kg |
|
Łapy |
2 |
|
Złącza ruchome |
8 |
|
Przenośny sterownik |
|
|
Wielkość |
≤ 270 mm × 170 mm × 100 mm |
|
Waga |
≤ 1,2 kg ((bez plecak) |
|
Wyświetlanie ekranu |
7' LCD |
|
Wyświetlacz |
7 kanałów, z których jeden ma funkcję autofocus zoom. |
|
Metoda działania |
Dwuwarzędowe działanie guzików i ekranu dotykowego |
|
Metoda kontroli |
Kontrola kablowa ≥100m ((Standardowy kabel),kontrola bezprzewodowa ≥1000m ((Wydrzewowa) |
|
Poziom ochrony i zdolność adaptacji do środowiska |
|
|
Platforma robota |
IP66 |
|
Ramię |
IP66 |
|
Temperatura pracy |
-40°C+50°C |
|
Temperatura przechowywania |
-45°C+60°C |
Skontaktuj się z nami
Pani Amy.
E-mail:/amy-huang@mysmech.com
Polecane produkty