





















Wszystkie produkty
-
Wielofunkcyjny przenośny noktowizor na podczerwień
-
Robot do usuwania materiałów wybuchowych
-
Miniaturowy robot rozpoznawczy
-
Monokularne cyfrowe widzenie nocne
-
Urządzenie cyfrowego widzenia nocnego
-
Przeciw snajperom
-
Przenośny radar
-
Lampa patrolowa rejestrująca
-
Sprzęt taktyczny do operacji specjalnych
-
Luneta celownicza
-
Dalmierz laserowy
-
Model wojskowy
-
wyposażenie taktyczne
-
Wzmocnione przynęty
Robot EOD średniej wielkości Hound-III do reagowania na improvizowane urządzenia wybuchowe










| Miejsce pochodzenia | Chiny |
|---|---|
| Nazwa handlowa | Particle |
| Numer modelu | REOD4000 |
| Minimalne zamówienie | 1 |
| Cena | $356,653 |
| Zasady płatności | T/T |

Skontaktuj się ze mną o darmowe próbki i kupony.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Jeśli masz jakiekolwiek obawy, oferujemy 24-godzinną pomoc online.
xSzczegóły Produktu
| Cechy szczególne | Przeciwwybuchowy, wodoodporny, z możliwością zdalnego rozbrojenia | Temperatura pracy | -40 ℃ ~ + 50 ℃ |
|---|---|---|---|
| Maksymalna prędkość | ≥5 m/s | Wielkość | 1600×850×1300 mm (całkowicie złożone) |
| Ramię manipulatora | - Tak, proszę. | Mobilność | Gąsienice lub koła |
| Rozmiar robota | 1600×850×1300 mm (całkowicie złożone) | Waga robota | ≤350kg (zawiera baterie) |
| Zwycięstwo przeszkody | ≥400mm | Szerokość rowu | ≥800 mm |
| Zdolność pokonywania wzniesień | ≥45° | Maksymalna zdolność pokonywania zboczy | 35° |
| Głębokość wadowania | ≥500 mm | Czas pracy baterii (normalna temperatura) | ≥10 godz. |
| Maksymalna odległość chwytania | 2,6m | Maksymalna waga chwytaka | ≥200kg |
| Maksymalna średnica uchwytu | ≥355 mm | Maksymalna głębokość chwytania | 2,2m |
| Ruchome stawy | 7 | Rozmiar sterownika | ≤400×300×100mm |
| Waga kontrolera | ≤3kg (bez plecaka) | Ekran wyświetlacza kontrolera | ≥12-calowy wyświetlacz LCD |
| Wyświetlacz wideo kontrolera | ≥7-kanałowy | Metoda operacji | Podwójne działanie przycisku i ekranu dotykowego |
| Metoda kontroli | Sterowanie kablowe ≥200 m (kabel standardowy), Sterowanie bezprzewodowe ≥1000 m (na zewnątrz) | Stopień IP platformy robota | IP66 |
| Stopień IP ramienia | IP66 | Temperatura przechowywania | -45 ℃ ~ 60 ℃ |
| Podkreślić | Roboty do usuwania materiałów wybuchowych Hound-III,Roboty do usuwania materiałów wybuchowych EOD,Robot do usuwania odpadów Hound-III |
||
opis produktu
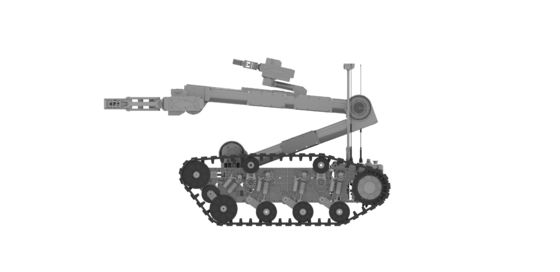
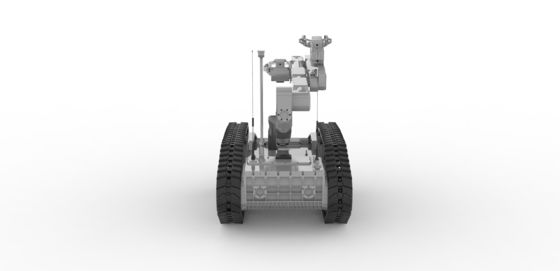
Robot Hound-III do reagowania na improwizowane urządzenia wybuchowe
|
Wnioski JP REOD4000 to średniej wielkości robot EOD. Ma super możliwości przenoszenia, usuwania materiałów wybuchowych i doskonałą wydajność terenową. Jest wyposażony w do 7-kanałowy system wideo.
Funkcjonalność Kontrola zdalna w celu zbliżenia się do niebezpiecznego miejsca, zbadanie potencjalnych źródeł niebezpieczeństwa, podejmowanie środków usuwania lub przenoszenie zagrożeń zgodnie z celami misji,Ochrona pracowników linii frontu i społeczeństwa przed obrażeniami ciała.
Cechy 1Wysokiej wytrzymałości konstrukcja ramienia mechanicznego, nadaje potężną wydajność chwytania;
Parametry techniczne
REOD4000 Szczegóły
|
Polecane produkty