





















Wszystkie produkty
-
Wielofunkcyjny przenośny noktowizor na podczerwień
-
Robot do usuwania materiałów wybuchowych
-
Miniaturowy robot rozpoznawczy
-
Monokularne cyfrowe widzenie nocne
-
Urządzenie cyfrowego widzenia nocnego
-
Przeciw snajperom
-
Przenośny radar
-
Lampa patrolowa rejestrująca
-
Sprzęt taktyczny do operacji specjalnych
-
Luneta celownicza
-
Dalmierz laserowy
-
Model wojskowy
-
wyposażenie taktyczne
-
Wzmocnione przynęty
Średni robot EOD z ramieniem współrzędnym X-Y-Z do precyzyjnego usuwania









| Miejsce pochodzenia | Chiny |
|---|---|
| Nazwa handlowa | Particle |
| Numer modelu | REOD500 |
| Minimalne zamówienie | 1 |
| Cena | $205,761 |
| Zasady płatności | T/T |

Skontaktuj się ze mną o darmowe próbki i kupony.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Jeśli masz jakiekolwiek obawy, oferujemy 24-godzinną pomoc online.
xSzczegóły Produktu
| Waga robotowej platformy | ≤ 350 kg ((zawiera baterie); | Zwycięstwo przeszkody | ≥400mm |
|---|---|---|---|
| Cechy | 1. Konstrukcja mechanicznego ramienia o wysokiej wytrzymałości zapewnia wysoką wydajność wyrywania; | Zdolność do pokonywania wzniesieńOdległość (tryb słabego oświetlenia) | ≥45° |
| Funkcje specjalne | Przeciwwybuchowy, wodoodporny, z możliwością zdalnego rozbrojenia | Głębokość brodzeniaOdległość (tryb termowizyjny) | ≥200mm |
| Rozmiar robota | ≤950×650×650mm (całkowicie złożone) | Długość ramienia | 2000 mm |
| Aplikacje | Reagowanie na improwizowane urządzenia wybuchowe | Pazury | 2 |
| Rozmiar kontrolera | ≤270mm×170mm×100mm | Ekran wyświetlacza kontrolera | 7-calowy wyświetlacz LCD |
| Metoda działania | Podwójne działanie przycisku i ekranu dotykowego | Maksymalna prędkość | ≥2m/s (5 biegów, płynna regulacja) |
| Nazwa produktu | Cele misji Robot Hound-III EOD do usuwania odpadów i przenoszenia zagrożeń | Głębokość wadowania platformy robotowej | ≥ 500 mm; |
| Rozmiar platformy robota | 1600×850×1300 mm ((Całkowicie schowane); | Żywotność baterii | ≥3h (normalna temperatura) |
| Temperatura pracy | -40℃~+50℃ | Stopień IP | IP66 |
| Waga robota | ≤50kg (zawiera dwa zestawy baterii) | Szerokość rowu | ≥400mm |
| Maksymalna waga wyrwania | ≥40kg | Wchodź po schodach | ≥45° |
| Ruchome stawy | 8 | Waga kontrolera | ≤1,2 kg (bez plecaka) |
| Wyświetlacz wideo | 7-kanałowy, z których jeden ma funkcję automatycznego ustawiania ostrości i zoomu | Wyświetlacz wideo | 7-kanałowy, z których jeden ma funkcję automatycznego ustawiania ostrości i zoomu |
| Metoda kontroli | Sterowanie kablowe ≥100m (standardowy kabel), sterowanie bezprzewodowe ≥1000m (na zewnątrz) | Temperatura przechowywania | 45 ℃ ~ 60 ℃ |
| Stopień IP ramienia | IP66 | ||
| Podkreślić | Infraczerwone monokulary wojskowe,Monokulary ręczne wojskowe,Wielofunkcyjny monokular wojskowy |
||
opis produktu
Średni robot EOD z ramieniem współrzędnych X-Y-Z do precyzyjnego usuwania
Opis i cechy
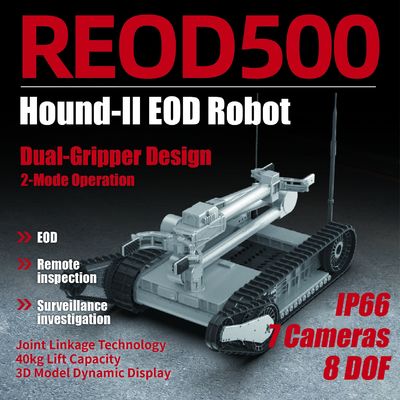
Robot EOD JP REOD500 to zaawansowane rozwiązanie do usuwania materiałów wybuchowych (EOD) w środowiskach wysokiego ryzyka. Wyposażony w system gąsienicowy z ramieniem wahadłowym, który łączy główną gąsienicę z mechanizmem pokonywania przeszkód z ramieniem wahadłowym, konstrukcja ta znacznie poprawia zdolności robota do pokonywania przeszkód, zapewniając solidne i niezawodne działanie w operacjach EOD. Robot jest wyposażony w wielostopniowe ramię robota, które zapewnia potężne możliwości chwytania i obsługi. JP REOD500 ma wymiary ≤900 mm × 650 mm × 500 mm (w pełni schowany) i wagę ≤42 kg. Ma maksymalną prędkość ≥2,0 m/s, pokonywanie przeszkód ≥320 mm oraz zdolność pokonywania wzniesień i wchodzenia po schodach do 45°, co zapewnia doskonałą manewrowość w różnych terenach.
Wyposażony w 8-stopniowy manipulator, JP REOD500 oferuje precyzyjną kontrolę z maksymalną wysokością chwytania ≥1800 mm (główny chwytak) i najdalszą odległością chwytania ≥1400 mm (główny chwytak). Robot obsługuje 7-kanałowy wyświetlacz wideo, umożliwiając bogatsze perspektywy obserwacji, i posiada zdalne możliwości wyświetlania pozycji 3D w czasie rzeczywistym. Z żywotnością baterii ≥3 godziny w normalnej temperaturze, stopniem ochrony IP67 dla odporności na kurz i wodę oraz metodami sterowania, które obejmują sterowanie kablowe do 120 m i sterowanie bezprzewodowe do 1200 m, JP REOD500 jest zbudowany z myślą o niezawodności i wszechstronności w trudnych warunkach. Dodatkowo oferuje opcje dostosowywania OEM i ODM w celu spełnienia specyficznych potrzeb operacyjnych.
Ulepszona konstrukcja ramienia mechanicznego — Zdecydowanie poprawiona wydajność chwytania
JP REOD500 posiada ulepszoną konstrukcję ramienia mechanicznego, która znacznie poprawia jego możliwości chwytania. Ta zaawansowana konstrukcja umożliwia robotowi obsługę różnych niebezpiecznych przedmiotów z większą precyzją i siłą, zwiększając ogólną wydajność operacji EOD.
Innowacyjna konstrukcja patentowa "2-chwytaki" — Możliwości wielozadaniowe
Opatentowana konstrukcja "2-chwytaki" pozwala JP REOD500 rozwiązywać wiele zadań jednocześnie. Z zarówno głównym chwytakiem, jak i pomocniczym chwytakiem, robot może wykonywać złożone operacje, takie jak chwytanie przedmiotów podczas otwierania drzwi lub wykonywanie innych zadań pomocniczych, co czyni go wysoce skutecznym w misjach EOD.
Graficzny tryb podwójny — Wygodne i niezawodne doświadczenie obsługi
Graficzny tryb podwójny zapewnia użytkownikom intuicyjny interfejs do sterowania robotem. Obsługiwane są zarówno elementy sterowania ekranem dotykowym, jak i joystickiem, co zapewnia łatwość użytkowania i niezawodność w stresujących środowiskach. Ta konstrukcja eliminuje potrzebę zapamiętywania przez użytkowników złożonych funkcji przycisków, skracając czas szkolenia i poprawiając wydajność operacyjną.
Zdalny wyświetlacz 3D w czasie rzeczywistym — Precyzyjna obsługa na wyciągnięcie ręki
JP REOD500 wykorzystuje zaawansowaną technologię wyświetlania wirtualnego 3D do informacji zwrotnej o statusie robota w czasie rzeczywistym. Ta funkcja umożliwia operatorom przeglądanie statusu 3D robota z różnych kątów, zapewniając intuicyjne i szczegółowe zrozumienie pozycji i otoczenia robota, nawet gdy działa poza linią wzroku.
 |
Inteligentna konstrukcja sterowania wstępnego — Spersonalizowane ustawienie pozycji roboczej
Inteligentna konstrukcja sterowania "wstępnego" pozwala JP REOD500 automatycznie osiągać wstępnie ustawione pozycje jednym kliknięciem, w oparciu o potrzeby użytkownika. Ta funkcja upraszcza proces obsługi, zmniejszając ilość wymaganej interwencji ręcznej i zapewniając szybkie i niezawodne wykonywanie zadań.
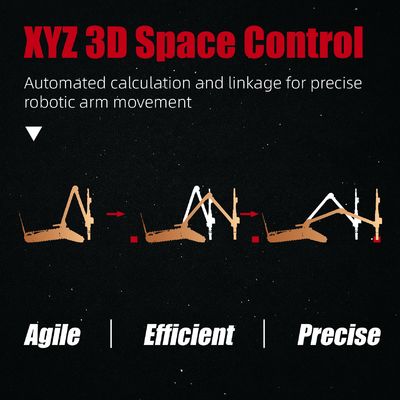
Konstrukcja połączenia ramienia robota trójwymiarowego "X-Y-Z" — Precyzyjna kontrola
JP REOD500 wykorzystuje trójwymiarową konstrukcję połączenia ramienia robota "X-Y-Z" opartą na automatycznym obliczaniu, zapewniając precyzyjną kontrolę nad ruchami robota. Ta konstrukcja zwiększa wydajność i dokładność zadań związanych z usuwaniem bomb, skracając średni czas operacji nawet o 80% w porównaniu z tradycyjnym sterowaniem jednoprzegubowym.
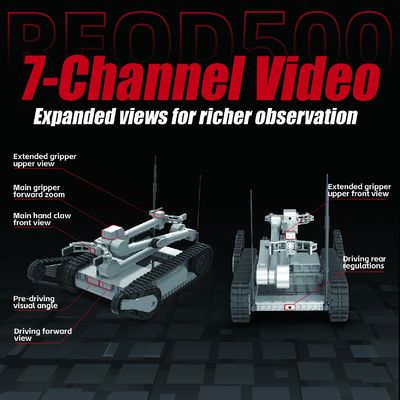
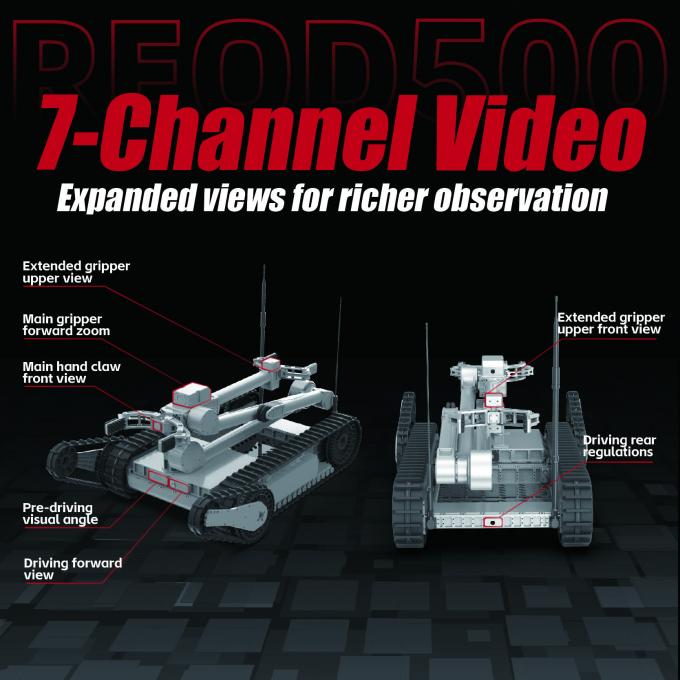
7-kanałowy system wideo — Bogatsze perspektywy obserwacji
Wyposażony w 7-kanałowy system wideo, JP REOD500 zapewnia wiele kątów obserwacji w celu zwiększenia świadomości sytuacyjnej. System obrazowania automatycznie przełącza się między trybem jazdy, trybem głównego chwytaka i trybem pomocniczego chwytaka, dostosowując się do kontekstu operacyjnego w celu uzyskania optymalnego widzenia.
 |
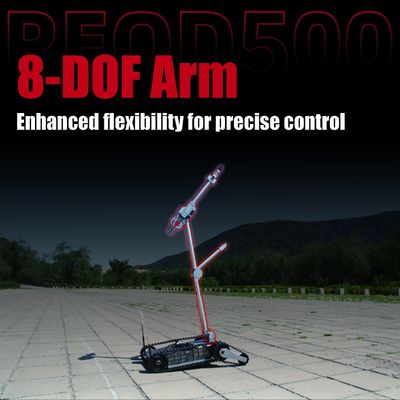
8-stopniowa konstrukcja ramienia robota — Bardziej elastyczna kontrola
8-stopniowa konstrukcja ramienia robota zapewnia JP REOD500 silne możliwości zasięgu przestrzennego, umożliwiając wykonywanie zadań w środowiskach wysokich, niskich, głębokich lub na blacie. Ta elastyczność sprawia, że nadaje się do szerokiego zakresu operacji EOD, które wymagają precyzji i adaptacji.
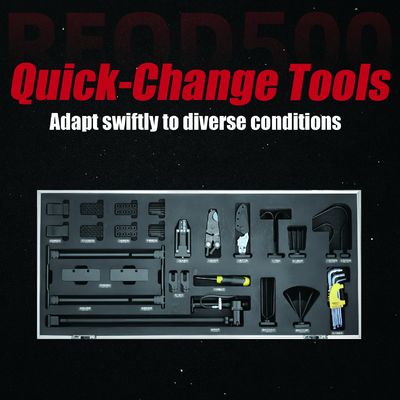
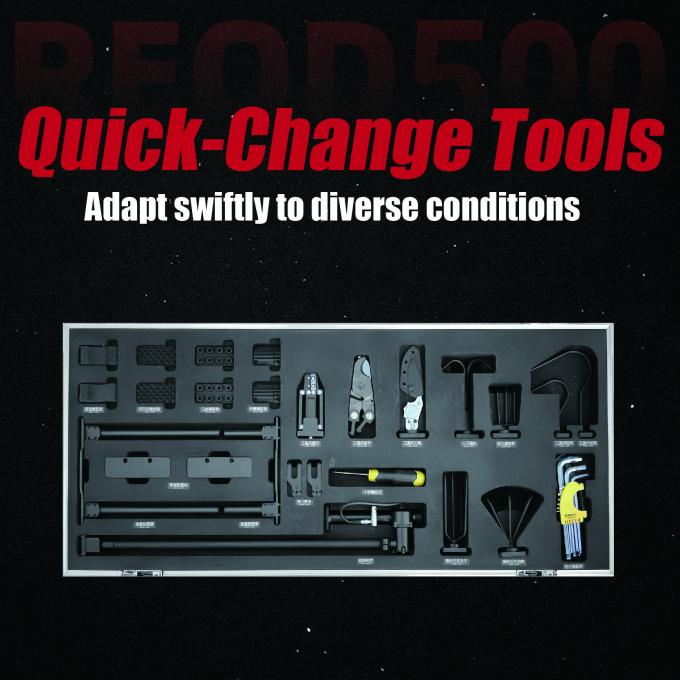
Wszechstronny system szybkiej wymiany narzędzi — Dostosowany do różnych warunków pracy
JP REOD500 jest wyposażony w wszechstronny system szybkiej wymiany narzędzi, w tym wiele zestawów narzędzi chwytających, podstawowe zestawy narzędzi i rozszerzone zestawy narzędzi. Narzędzia te można szybko wymieniać w oparciu o specyficzne wymagania operacyjne, umożliwiając robotowi bezproblemowe dostosowanie się do różnych warunków pracy i skuteczne radzenie sobie z różnymi rodzajami zagrożeń.
 |
Zastosowania
 |
Galeria zdjęć
 |
 |
 |
Parametry techniczne
| Platforma robota | |
| Rozmiar | ≤950×650×650mm (w pełni schowany) |
| Waga | ≤50kg (Zawiera dwa zestawy baterii) |
| Maksymalna prędkość | ≥2m/s (5 biegów, płynna regulacja) |
| Zdolność pokonywania przeszkód | ≥400mm |
| Szerokość rowka | ≥400mm |
| Zdolność pokonywania wzniesień | ≥45° |
| Wchodzenie po schodach | ≥45° |
| Głębokość brodzenia | ≥200mm |
| Żywotność baterii (Temperatura normalna) | ≥3h |
| Wydajność chwytania ramienia robota | |
| Długość ramienia | 2000mm |
| Maksymalna waga chwytania | ≥40kg |
| Chwytaki | 2 |
| Ruchome przeguby | 8 |
| Przenośny kontroler | |
| Rozmiar | ≤270mm×170mm×100mm |
| Waga | ≤1,2 kg (Bez plecaka) |
| Ekran wyświetlacza | 7'' LCD |
| Wyświetlanie wideo | 7-kanałowy, z których jeden ma funkcję automatycznego zoomu |
| Metoda obsługi | Tryb podwójny przycisku kołyskowego i ekranu dotykowego |
| Metoda sterowania | Sterowanie kablowe ≥100m (Kabel standardowy), Sterowanie bezprzewodowe ≥1000m (Na zewnątrz) |
| Poziom ochrony i adaptacja do środowiska | |
| Platforma robota | IP66 |
| Ramię | IP66 |
| Temperatura pracy | -40℃~+50℃ |
| Temperatura przechowywania | -45℃~+60℃ |
Skontaktuj się z nami
Pani Amy
whatsapp/wechat: +86 13621280280
Polecane produkty