





















Wszystkie produkty
-
Wielofunkcyjny przenośny noktowizor na podczerwień
-
Robot do usuwania materiałów wybuchowych
-
Miniaturowy robot rozpoznawczy
-
Monokularne cyfrowe widzenie nocne
-
Urządzenie cyfrowego widzenia nocnego
-
Przeciw snajperom
-
Przenośny radar
-
Lampa patrolowa rejestrująca
-
Sprzęt taktyczny do operacji specjalnych
-
Luneta celownicza
-
Dalmierz laserowy
-
Model wojskowy
-
wyposażenie taktyczne
-
Wzmocnione przynęty
Kompaktowy robot EOD Lekki robot do rozbrajania bomb








| Miejsce pochodzenia | Chiny |
|---|---|
| Nazwa handlowa | Particle |
| Minimalne zamówienie | 1 sztukę |
| Cena | $17,000 |
| Zasady płatności | T/T |

Skontaktuj się ze mną o darmowe próbki i kupony.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Jeśli masz jakiekolwiek obawy, oferujemy 24-godzinną pomoc online.
xSzczegóły Produktu
| Nazwa | Robot EOD | Aplikacja | usuwanie amunicji wybuchowej (EOD) w środowiskach wysokiego ryzyka. |
|---|---|---|---|
| Indywidualne wsparcie | OED,ODM,OBM | Gwarancja | 1 rok |
| Kolor | Czarny | Czas pracy (temperatura pokojowa) | ≥2H |
| Temperatura pracy | -40℃~+50℃ | Stopień IP | IP66 |
| Rozmiar | ≤850×600×660mm (całkowicie złożone) | Waga | ≤50kg (zawiera dwa zestawy baterii) |
| Maksymalna prędkość | ≥ 1,8 m/s (5 biegów, płynna regulacja) | Zwycięstwo przeszkody | ≥ 300mm |
| Szerokość rowu | ≥ 400 mm | GDOUNDACJA | ≥45° |
| Wchodź po schodach | ≥45° | Maksymalna szerokość otwarcia chwytaka | ≥160mm |
| Udźwig | 8-30 kg | Metoda działania | Podwójna obsługa przycisku Rocker i ekranu dotykowego |
| Metoda kontroli | Sterowanie kablowe ≥100m (standardowy kabel), sterowanie bezprzewodowe ≥1000m (na zewnątrz) | ||
| Podkreślić | Wielofunkcyjne lornetki nocne,Lekkie lornetki nocne laserowe,Blokady widzenia nocnego na wysokości 6000 m |
||
opis produktu
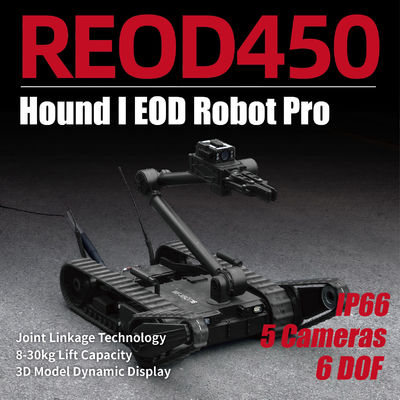
Kompaktowy robot EOD Lekki robot do usuwania bomb
Opis i cechy
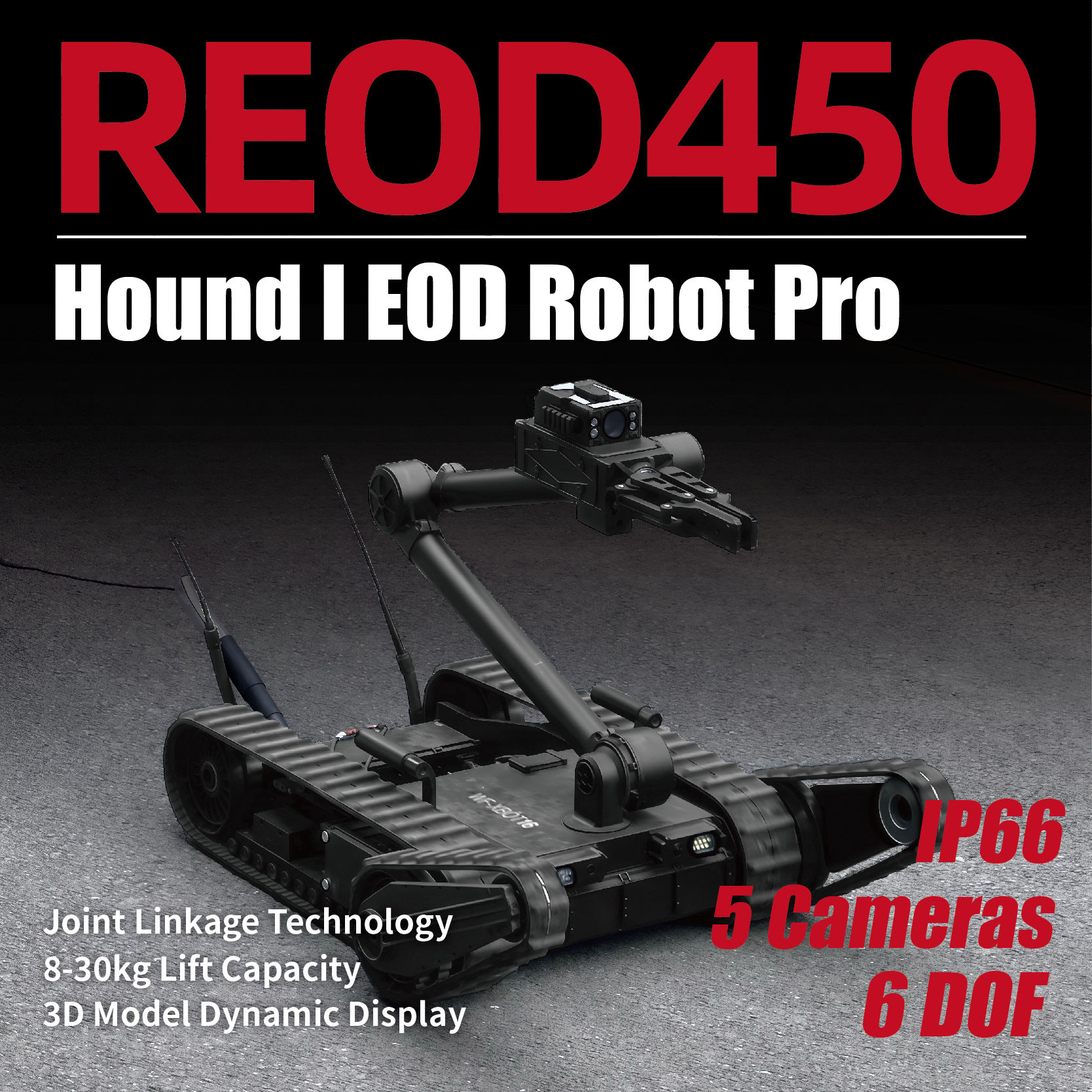
Robot EOD REOD450 to zaawansowane rozwiązanie do usuwania materiałów wybuchowych (EOD) w środowiskach wysokiego ryzyka. Wyposażony w unikalną konstrukcję „dwóch chwytaków”, może jednocześnie wykonywać różnorodne zadania, co czyni go wysoce wydajnym w operacjach takich jak miejska walka z terroryzmem, bezpieczeństwo publiczne, pomoc w przypadku trzęsień ziemi i usuwanie bomb. Robot jest kompaktowy i lekki, o wymiarach ≤850 mm × 600 mm × 400 mm (w pełni złożony) i wadze ≤50 kg. Ma maksymalną prędkość ≥1,8 m/s z 5 biegami i bezstopniową przekładnią, pokonywanie przeszkód ≥300 mm oraz zdolność pokonywania wzniesień i wchodzenia po schodach do 45°, co zapewnia doskonałą manewrowość i adaptację w różnych terenach.
Wyposażony w 8-stopniowy Manipulator, REOD450 oferuje precyzyjną kontrolę z maksymalną wysokością chwytania ≥1700 mm (główny chwytak) i najdalszą odległością chwytania ≥1380 mm (główny chwytak). Robot obsługuje 7-kanałowy wyświetlacz wideo, umożliwiając bogatsze perspektywy obserwacji, i posiada zdalne możliwości wyświetlania w czasie rzeczywistym w 3D. Z żywotnością baterii ≥2 godziny w normalnej temperaturze, stopniem ochrony IP66 dla odporności na kurz i wodę oraz metodami sterowania, które obejmują sterowanie kablowe do 100 m i sterowanie bezprzewodowe do 1000 m, REOD450 jest zbudowany z myślą o niezawodności i wszechstronności w trudnych warunkach. Dodatkowo oferuje opcje dostosowywania OEM i ODM, aby spełnić specyficzne potrzeby operacyjne.
Obsługa dotykowa / joystick — Bardziej przyjazna dla użytkownika interakcja i niezawodne działanie
Graficzny projekt obsługi dotykowej / joysticka jest obecnie wiodącym rozwiązaniem sterowania robotem do usuwania bomb na arenie międzynarodowej. Został on wysoko oceniony przez użytkowników za bardziej przyjazną dla użytkownika interakcję i niezawodne działanie. Jego główne cechy to:
- Graficzny projekt obsługi: Wszystkie operacje są zaprojektowane w sposób graficzny, eliminując potrzebę zapamiętywania przez użytkowników złożonych funkcji przycisków i protokołów operacyjnych. Ten przyjazny dla użytkownika interfejs sprawia, że obsługa jest prosta i intuicyjna, znacznie skracając czas szkolenia.
- Projekt obsługi dotykowej / joysticka: Zarówno przyciski joysticka, jak i ekran dotykowy mogą być używane do wykonywania wszystkich operacji robota. Redundancja zapewniana przez te dwie metody operacyjne nie tylko zwiększa niezawodność systemu, ale także poprawia wydajność operacyjną, łącząc przyciski joysticka z elementami sterowania ekranu dotykowego.
Zdalny wyświetlacz 3D w czasie rzeczywistym — Blisko, bardziej intuicyjna obsługa
Ponieważ roboty do usuwania bomb często działają poza linią wzroku podczas misji, informacje w czasie rzeczywistym o kątach i pozycjach przestrzennych przegubów robota są kluczowe dla operatorów. REOD450 wykorzystuje szybkie łącza i zaawansowaną technologię komputerową, aby nie tylko osiągnąć informację zwrotną w czasie rzeczywistym o stanie robota, ale także wykorzystać wiodącą technologię wirtualnego wyświetlania 3D do zdalnego wyświetlania w czasie rzeczywistym stanu 3D robota. To sprawia, że robot jest „blisko” nawet wtedy, gdy jest „daleko”, co pozwala na bardziej intuicyjną obsługę.
Główne cechy zdalnego wyświetlacza 3D w czasie rzeczywistym to:
- Wyświetlanie w czasie rzeczywistym stanu 3D robota
- Obserwacja stanu 3D robota z różnych kątów
- Powiększanie i pomniejszanie stanu 3D robota
Kontroler ręczny robota odtwarza zdalny stan 3D robota, umożliwiając powiększanie, pomniejszanie i obserwację modelu 3D z dowolnego kąta.
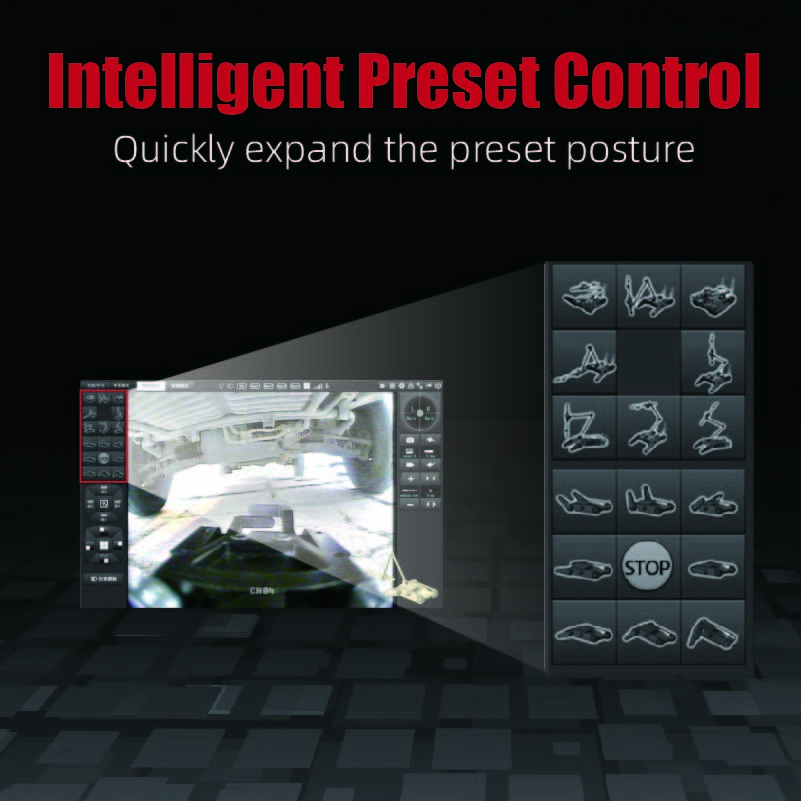
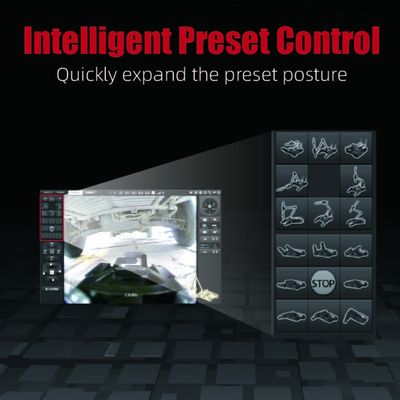
Inteligentny projekt sterowania wstępnie ustawioną pozycją — Prostsza i szybsza obsługa
Dzięki „Inteligentnemu sterowaniu wstępnie ustawioną pozycją dla typowych zadań”, robot może „automatycznie osiągnąć wstępnie ustawioną pozycję jednym kliknięciem” w oparciu o potrzeby użytkownika. Ta funkcja znacznie zmniejsza ilość ręcznej obsługi wymaganej na miejscu, służąc jako skuteczny asystent dla operatorów na pierwszej linii i zwiększając niezawodność i bezpieczeństwo zadań związanych z usuwaniem bomb.
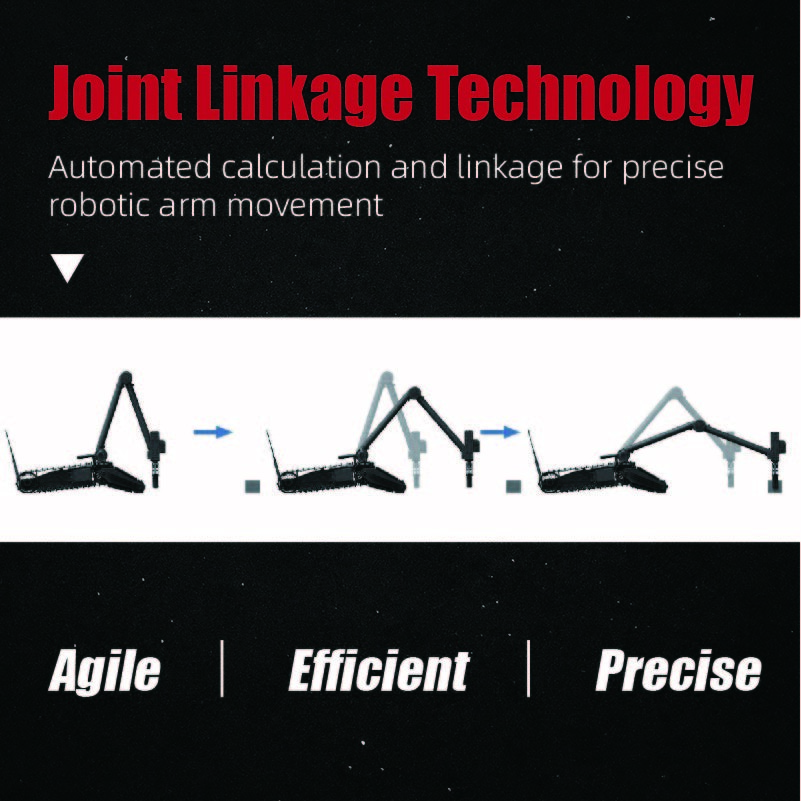
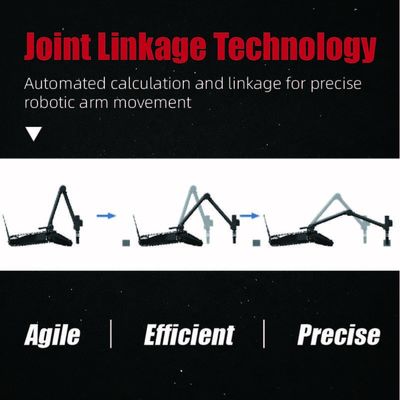
Technologia połączeń przegubowych „X-Y-Z” — Bardziej precyzyjna i wydajna kontrola
Projekt operacyjny technologii połączeń przegubowych „X-Y-Z” oparty na automatycznym obliczaniu, znany również jako „projekt sterowania translacją chwytaka oparty na współrzędnych kartezjańskich”, przekształca tradycyjne sterowanie „pojedynczym przegubem” robotów do usuwania bomb w sterowanie „wieloprzegubowe”. To znacznie poprawia wydajność operacyjną i dokładność robotów do usuwania bomb. W porównaniu z konstrukcją sterowania „pojedynczym przegubem”, skraca średni czas operacji o 80%.
REOD450 osiąga „sterowanie translacją chwytaka oparte na współrzędnych kartezjańskich” poprzez automatyczne obliczanie. Aby chwytać podejrzane niebezpieczne przedmioty w poziomej jednowymiarowej przestrzeni, szybko kontroluje robota, aby osiągnąć „wieloprzegubowy ruch skoordynowany” dla jednowymiarowej translacji chwytaka przestrzennego. To znacznie zmniejsza trudności operacyjne i zwiększa dokładność, umożliwiając niemal natychmiastowe pozycjonowanie bez konieczności powtarzania iteracji.
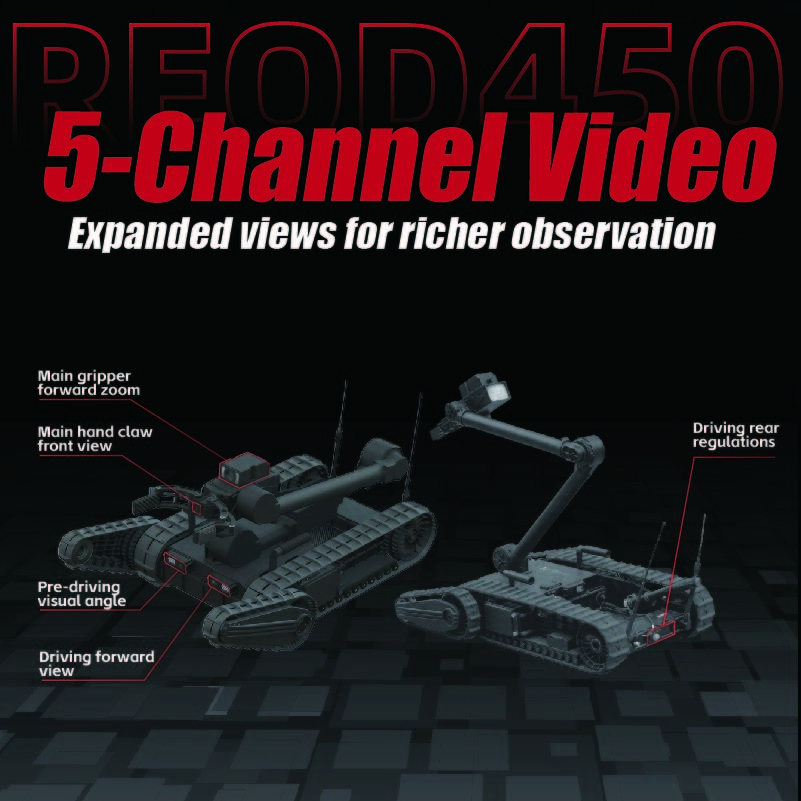
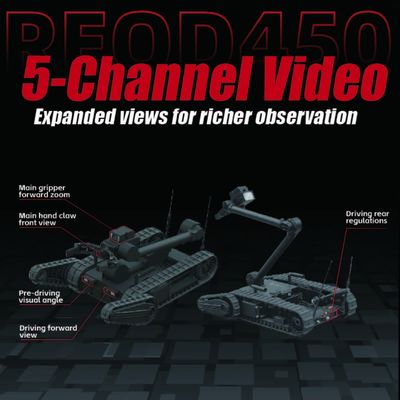
System obrazowania adaptacyjny do trybu — Siedem widoków kamery dla lepszej obserwacji
System obrazowania robota działa jako oczy operatora. REOD450 posiada innowacyjny projekt systemu obrazowania adaptacyjnego do trybu z 7-kamerowym systemem, znacznie zwiększając zdolność operatorów na pierwszej linii do postrzegania odległych środowisk. Projekt 7-kamerowego systemu nie jest prostym układem, ale raczej ulepszeniem i optymalizacją w oparciu o problemy napotykane przez użytkowników podczas rzeczywistego użytkowania.
System obrazowania jest ogólnie podzielony na trzy kombinacje obrazów: tryb jazdy, tryb głównego chwytaka i tryb rozszerzonego chwytaka. Automatycznie przełącza się między tymi trybami w oparciu o typowe zadania, takie jak jazda, chwytanie i obserwacja, oferując silniejszą świadomość środowiska zdalnego i bogatszy zakres kątów obserwacji.
Ośmiostopniowa konstrukcja zintegrowanego ramienia robota — Bardziej elastyczna i bezpieczna kontrola
Ramię robota REOD450 posiada zintegrowaną konstrukcję z 8 stopniami swobody, zapewniając silne możliwości sięgania w przestrzeni. Ta konstrukcja pozwala ramieniu robota wykonywać nie tylko konwencjonalne zadania związane z usuwaniem bomb, ale także operacje, których nie mogą wykonać konwencjonalne roboty do usuwania bomb z 5 lub 6 stopniami swobody, takie jak chwytanie obiektów w środowiskach wysokich, niskich, głębokich lub na blacie, a także prowadzenie rozpoznania wielokątnego w środowiskach wysokich, niskich i głębokich.
Wszechstronny system szybkiej wymiany narzędzi
Robot REOD450 jest wyposażony w 18 rodzajów „narzędzi szybkiej wymiany”, w tym 6 zestawów narzędzi chwytających, 6 podstawowych zestawów narzędzi i 6 rozszerzonych zestawów narzędzi, umożliwiając szybką wymianę „zestawów narzędzi chwytających” w oparciu o różne zadania operacyjne oraz rodzaje i kształty różnych niebezpiecznych przedmiotów, spełniając w ten sposób zróżnicowane potrzeby operacyjne użytkowników.
Zastosowania
Galeria zdjęć
Parametry techniczne
| Platforma robota | |
| Rozmiar | ≤850×600×660mm (w pełni złożony) |
| Waga | ≤50kg (zawiera dwa zestawy baterii) |
| Maksymalna prędkość | ≥ 1,8 m/s (5 biegów, bezstopniowa) |
| Zdolność pokonywania przeszkód | ≥ 300mm |
| Szerokość rowka | ≥ 400mm |
| Zdolność pokonywania wzniesień | ≥45° |
| Wchodzenie po schodach | ≥45° |
| Żywotność baterii (temperatura normalna) | ≥2h |
| Stopień IP | IP66 |
| Wydajność chwytania ramienia robota | |
| Stan rozszerzony | ≥8kg |
| Stan schowany | ≥30kg |
| Szpony | 1 |
| Ruchome przeguby | 8 |
| Maksymalna wysokość obserwacji | ≥2400mm |
| Maksymalna wysokość chwytania | ≥1700mm(Główny chwytak),≥2000mm(Wice-chwytak) |
| Najdalsza odległość chwytania | ≥1380mm(Główny chwytak),≥1650mm(Wice-chwytak) |
| Maksymalna szerokość otwarcia chwytaka | ≥160mm |
| Kontroler przenośny | |
| Rozmiar | ≤360×210×70mm |
| Waga | ≤2kg (bez plecaka) |
| Ekran wyświetlacza | 10,1'' LCD |
| Wyświetlanie wideo | 7-kanałowy |
| Metoda obsługi | Tryb podwójny przycisku kołyskowego i ekranu dotykowego |
| Metoda sterowania |
Sterowanie kablowe≥100m (kabel standardowy), Sterowanie bezprzewodowe≥1000m (na zewnątrz) |
Polecane produkty